Performance
JAX performance model
SPECTRAX-GK uses JAX to compile array kernels ahead of time, enabling
vectorized, accelerator-ready performance while retaining automatic
differentiation. The linear operator and time integrator are designed to be
jit-friendly and to avoid Python-side loops in performance-critical paths.
The linear solver precomputes geometry-dependent arrays (gyroaverage
coefficients, drift components, mirror term, and zero-mode masks) in a LinearCache to
avoid recomputing them at each time step. This cache is reused inside the JIT
compiled integrator.
Cache profiling
Cache profiling uses the maintained cache-build subphase profiler, not the old
cached-versus-uncached local timing probe. The profiler decomposes
build_linear_cache() into geometry loading, spectral-grid construction,
gyroaverages, Laguerre transforms, drift coefficients, damping factors, and the
final cache assembly. This makes performance work actionable because each row
maps to a concrete cache-construction phase.
python tools/profiling/profile_startup_and_cache.py linear-cache \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear.toml \
--Nl 4 --Nm 8 \
--json-out tools_out/linear_cache_cyclone_gpu.json \
--csv-out tools_out/linear_cache_cyclone_gpu.csv
Fixed-step linear integrator profiling
Use the maintained integrator benchmark for matched warm fixed-step profiles; it accepts explicit method, timestep, resolution, and JSON-output controls:
python benchmarks/performance/benchmark_integrators.py \
--skip-diffrax --method sspx3 --steps 480 --dt 0.005 \
--Nl 7 --Nm 14 --ky 0.3 --warmup 1 --repeat 5 \
--out-json tools_out/linear_sspx3_profile.json
The tracked before/after artifact
docs/_static/linear_sspx3_stage_profile.json compares the same finite
Cyclone trajectory before and after explicit-stage consolidation. State and
field-history norms agree exactly, while median CPU times are 3.202 s and
3.223 s. The 0.7% difference is below the 3% reporting threshold and has the
wrong sign for a speedup claim. XLA already removed the unused SSPX3 stage from
the compiled graph; the change therefore improves single ownership and eager
execution without a measurable end-to-end compiled speedup.
No speedup claim should be made from a local profile, scaling panel, or parallelization artifact unless the matching numerical-identity gate and hardware-specific profiler artifact are cited together. Current production parallelization claims are limited to independent-work batching; whole-state nonlinear sharding and nonlinear domain decomposition remain diagnostic unless their workload-specific identity and profiler promotion gates pass.
The nonlinear spectral-domain profile now records both the older
global-reconstruction logical route and a pencil-FFT fused-bracket route. The
pencil work model removes the state/bracket allgather from the estimated
communication path and predicts plausible scaling on the tracked four-tile
micro-route, but the local JIT timing remains below the production 1.5x
gate. Treat this as implementation evidence for the next distributed-FFT
tranche, not as a shipped nonlinear domain-decomposition speedup.
The follow-up z-sharded fused pencil RHS artifact
docs/_static/nonlinear_device_z_pencil_rhs_cpu4_profile.json is the first
active device-sharded version of that idea. It passes serial-vs-sharded RHS
identity on a (4,16,96,96,32) bracket workload with maximum absolute error
7.6e-10. The shard_map route is now a CPU speedup candidate for this
RHS microkernel: 1.51x on two logical CPU devices and 2.62x on four
logical CPU devices. The two-GPU office artifact
docs/_static/nonlinear_device_z_pencil_rhs_gpu2_profile.json also passes
host-gathered RHS identity (max_abs_error=5.24e-10) after staging the
initial state through host before applying explicit z sharding, but reaches only
1.09x versus the single-GPU serial JIT route, below the 1.5x GPU speedup
gate.
The next gate is a fixed-step physical transport-window profile that advances
the same serial and z-sharded routes for four nonlinear steps and compares the
final state plus free-energy, field-energy, physical-flux, and bracket-RMS
traces. The CPU artifact
docs/_static/nonlinear_device_z_pencil_transport_cpu4_profile.json passes
all active identity checks on two and four logical CPU devices for the same
(4,16,96,96,32) workload. It reaches 1.61x on two logical CPU devices
and 3.13x on four, with maximum final-state absolute error 7.45e-9.
The HLO dump recorded in the JSON shows local FFT lowering for the sharded
route and no all-to-all or collective-permute operations. The matching two-GPU
artifact
docs/_static/nonlinear_device_z_pencil_transport_gpu2_profile.json also
passes the transport-window identity gate (max_abs_error=7.45e-9), but only
reaches 1.48x versus one GPU. Its Perfetto/TensorBoard trace was written
under /tmp/spectrax_traces during generation, and its HLO summary likewise
shows no collectives. The GPU blocker is therefore speedup/work granularity,
not numerical identity or a hidden global reconstruction. This remains a
micro-route transport-window claim, not a full production nonlinear
turbulence-solve speedup claim.
For larger GPU diagnostic grids, the profiler also supports
--z-chunk-size or --auto-z-chunk-size. The automatic option uses a
backend-free cuFFT batch-pressure preflight model to choose a local
z_chunk_size before launching the timed route. This processes independent
local z slabs separately and can avoid cuFFT batched-plan failures when used with
XLA_PYTHON_CLIENT_PREALLOCATE=false. The June 13, 2026 office diagnostics
used this mode to run previously failing (4,16,96,96,64) and
(4,16,128,128,32) transport windows, but their two-GPU speedups were only
about 1.40x and 1.30x respectively. Treat this as bottleneck
localization, not as promotion evidence.
Use --observable-repeats when a device-z transport-window profile needs to
separate compute-only RHS/integrator timing from the scalar observable and
identity-gate path. The speedup rows still time only fixed-step final-state
updates; the observable_gate_* JSON/CSV fields report the cost of
host-gathered free-energy, field-energy, physical-flux, and bracket-RMS checks
separately. Those fields are diagnostic bottleneck evidence and are not part of
the nonlinear speedup promotion gate.
Use --observable-mode sharded_reduce to evaluate the same scalar
observables through z-sharded device reductions instead of full-state host
gathers. This is an identity/profiling option, not a production speedup mode:
when it recomputes the nonlinear bracket only for diagnostics, it can be slower
than the host-gathered path. A production version should fuse scalar diagnostic
accumulation into the RHS/update route rather than launching a second bracket
pipeline.
The tracked office artifact
docs/_static/nonlinear_device_z_pencil_transport_gpu2_observable_split_profile.json
records this split on the (4,16,96,96,64) auto-chunked two-GPU diagnostic:
identity passes, compute-only speedup remains below gate at 1.19x, and the
observable gate median is about 42.6 times the sharded compute median. The
next production route should therefore keep scalar diagnostics streamed and
fused with the device computation rather than host-gathering full states or
recomputing the nonlinear bracket every step.
For this release, performance work is closed at that evidence-backed boundary: runtime/memory accounting, nonlinear RHS hot-path localization, production independent-work parallelization, and diagnostic nonlinear decomposition identity are tracked and reproducible. Production nonlinear domain decomposition is deferred until a full solver route fuses scalar diagnostics into the RHS/update path and clears matched CPU/GPU transport-window speedup gates.
Nonlinear profiling
For end-to-end nonlinear performance, use the dedicated Cyclone profiling driver. It supports Perfetto traces, XLA HLO dumps, and memory snapshots.
python tools/profiling/profile_runtime_kernels.py cyclone \
--trace-dir /tmp/spectrax_nl_trace \
--xla-dump-dir /tmp/spectrax_nl_xla \
--steps 400 --dt 0.0377 --Nl 4 --Nm 8
For repeated Python objective or ensemble calls with fixed geometry and model
policy, add --reuse-prepared-simulation and an explicit --steps. The
ordinary command remains the executable-style end-to-end startup profile; the
prepared mode measures compile-once repeated-call throughput.
The trace directory can be opened with Perfetto. For GPU profiling, set
JAX_PLATFORM_NAME=gpu before invoking the script.
JAX writes the trace under
<trace-dir>/plugins/profile/<timestamp>/*.trace.json.gz together with the
corresponding *.xplane.pb metadata; the same directory can be opened in
XProf, while the optional memory.prof snapshot can be inspected with
pprof or XProf’s memory tooling.
JAX/XProf operational notes
Two JAX runtime details matter when reading short-run performance numbers:
JAX’s persistent compilation cache can remove repeated recompilation cost for fixed signatures. For repeated local profiling runs, set
JAX_COMPILATION_CACHE_DIRbefore the first compilation. This is useful for engineering sweeps, but the shipped runtime panel should remain a cold end-to-end measurement unless stated otherwise.JAX GPU runs preallocate most device memory by default. When diagnosing an out-of-memory failure on a shared machine, use
XLA_PYTHON_CLIENT_PREALLOCATE=falseor a reducedXLA_PYTHON_CLIENT_MEM_FRACTIONduring the profiling run. Those knobs are useful for debugging and tracing, but they should not silently change the published benchmark contract.
Recent nonlinear profiling (Cyclone, benchmark-locked config)
Reference run configuration (March 4, 2026):
ky=0.3,Nl=4,Nm=8dt=0.01,steps=400sample_stride=10,diagnostics_stride=10tools/profiling/profile_runtime_kernels.py cyclonewith the tracked Cyclone runtime config
CPU profiling (Apple CPU, JAX CPU backend):
warmup_time_s=117.803
run_time_s=109.147
GPU profiling (A100-class GPU, JAX CUDA backend):
warmup_time_s=38.950
run_time_s=21.350
HLO summary (jit_scan.*_after_optimizations):
CPU:
fft=623,scatter=72,gather=375,dot=88,fusion=1053GPU:
fft=440,scatter=30,gather=322,dot=44,fusion=831
The nonlinear RHS remains FFT-heavy with nontrivial gather/scatter density. Primary optimization targets are the FFT pipeline (channel stacking, reuse of real-space gradients) and scatter removal in linked-FFT paths.
GPU memory report (jit_scan module):
Total bytes used:
228.21 MiB(XLA memory usage report).
Nonlinear benchmark harness
To capture per-step runtime and end-of-run diagnostics, use the nonlinear benchmark harness:
python benchmarks/performance/benchmark_nonlinear_suite.py --steps 200 --dt 0.0377 \
--out /tmp/spectrax_nl_bench.csv
The harness records scalar diagnostics through the compact diagnostics path, so it measures runtime without materializing mode-resolved history arrays unless a separate publication artifact explicitly requests them.
To test the optional spectral nonlinear mode (no Laguerre quadrature grid):
python benchmarks/performance/benchmark_nonlinear_suite.py --laguerre-mode spectral
You can optionally pass a reference-code log file to compare runtime per step:
python benchmarks/performance/benchmark_nonlinear_suite.py --gx-log /path/to/gx_run.out
RHS kernel profile (nonlinear Cyclone)
The RHS split profiler measures field solve, nonlinear bracket, linear RHS, and full RHS kernels after compilation:
python tools/profiling/profile_runtime_kernels.py nonlinear-step-split \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear_short.toml \
--repeats 10 \
--out docs/_static/nonlinear_rhs_profile_gpu.csv
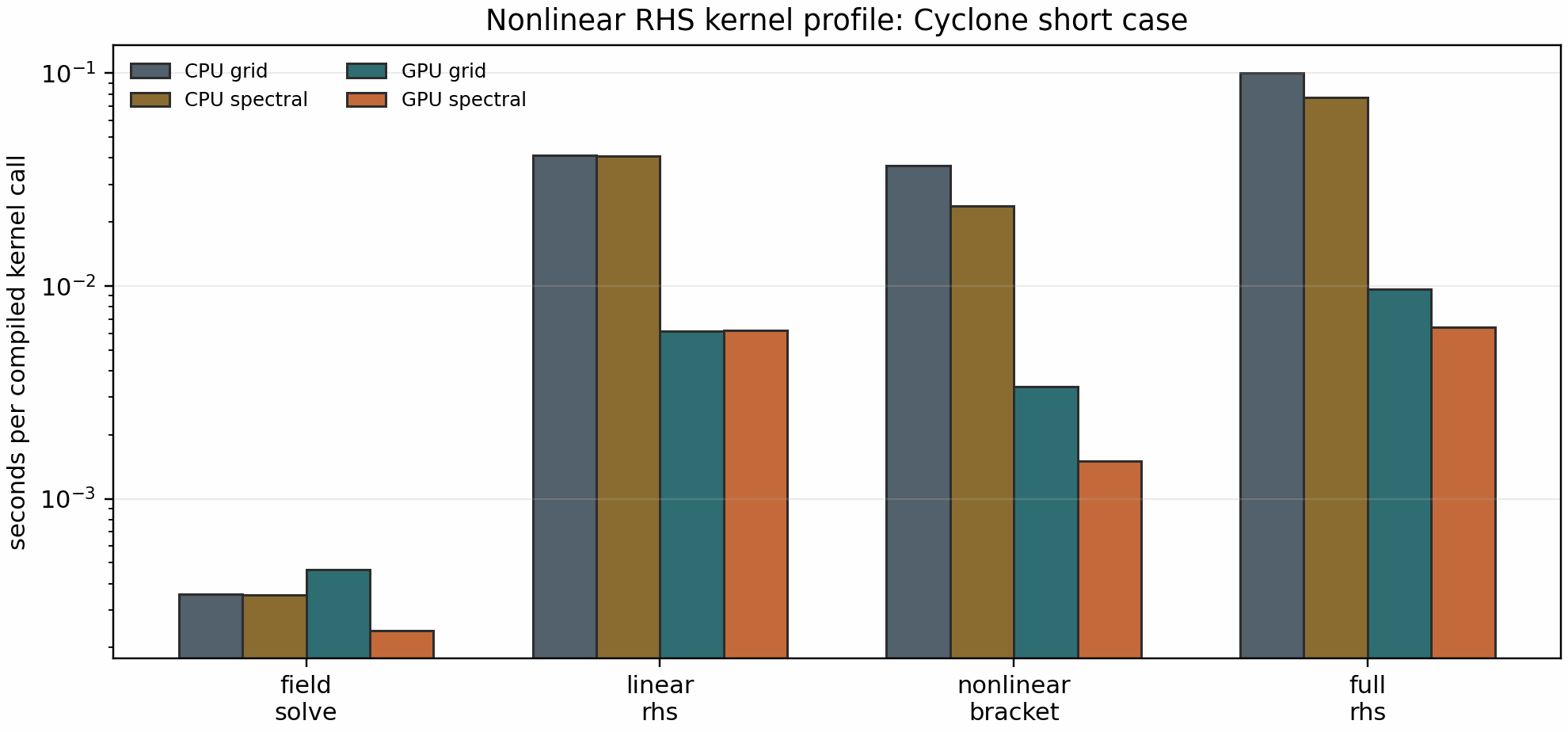
The current bounded Cyclone profile separates CPU and office GPU timings
for default grid-mode and optional spectral-mode nonlinear brackets. The
machine-readable companion docs/_static/nonlinear_rhs_profile.json records
the dominant measured kernel, kernel fractions relative to the full RHS, and
grid-to-spectral speedups for each backend. The May 9, 2026 refresh used the
same short-case 10-repeat harness on local CPU and one office RTX A4000
with CUDA_VISIBLE_DEVICES=0 after the linear-RHS fast-path and linked-FFT
refactor tranche. The GPU environment reported
jax==0.6.2/jaxlib==0.6.2; these are profiler-local hot-path
measurements, not a broad production runtime claim. The refreshed GPU
grid-mode split is:
python tools/artifacts/plot_scaling_panels.py rhs-profile \
--out docs/_static/nonlinear_rhs_profile.png
field_solve=4.65e-4 s
nonlinear_bracket=3.36e-3 s
linear_rhs=6.13e-3 s
full_rhs=9.66e-3 s
The same GPU profile with laguerre_mode="spectral" measured
nonlinear_bracket=1.50e-3 s and full_rhs=6.38e-3 s. CPU full-RHS
timings from the same harness were 1.01e-1 s for grid mode and
7.73e-2 s for spectral mode. The short-harness spectral full-RHS ratios
are now 1.30 on CPU and 1.51 on GPU for this Cyclone case, while the
nonlinear-bracket-only ratios are 1.54 on CPU and 2.24 on GPU. The
spectral mode therefore remains an opt-in mode guarded by the case-level
parity gate below rather than a global default.
The dominant remaining warm-throughput cost is the compiled linear RHS, with the nonlinear FFT pipeline still relevant for larger production grids. The next performance step is to repeat this split on larger benchmark-size cases and then use profiler traces to decide whether fusion, layout changes, or production decomposition give the largest verified win.
Benchmark-size Cyclone Miller RHS profile
The larger Cyclone Miller profile uses the shipped nonlinear Miller input with
Nx=192, Ny=64, Nz=24, Nl=4, and Nm=8. This is still a
single compiled-RHS split profile rather than a full transport-average runtime
claim, but it is large enough to expose a different bottleneck balance than the
short Cyclone case.
python tools/profiling/profile_runtime_kernels.py nonlinear-step-split \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear_miller.toml \
--repeats 5 \
--out docs/_static/nonlinear_rhs_profile_miller_cpu.csv
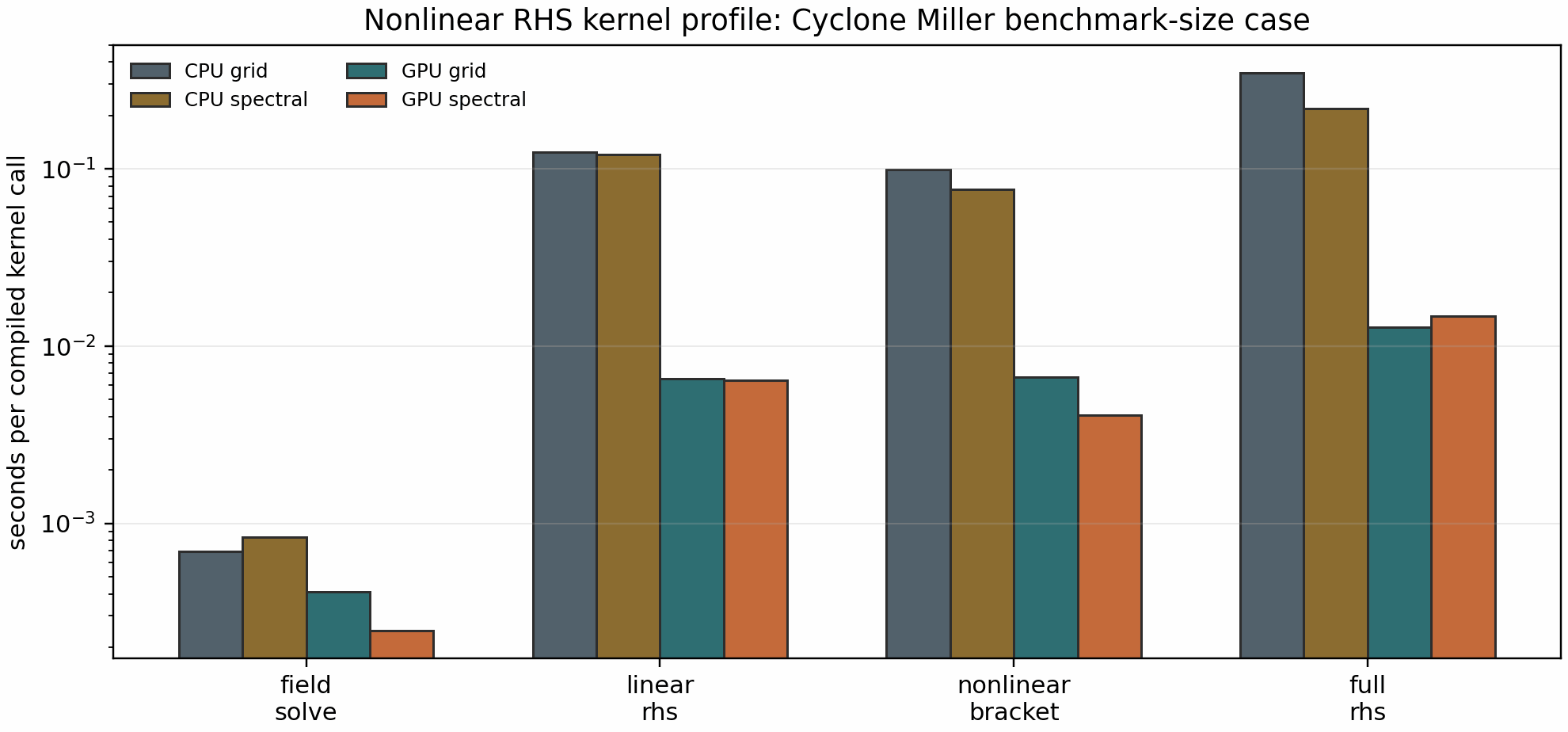
The May 10, 2026 local CPU refresh after the independent-worker
parallelization tranche measured CPU full-RHS timings of 3.48e-1 s in grid
mode and 2.20e-1 s in spectral Laguerre mode, with measured sub-kernels
linear_rhs=1.24e-1 s and nonlinear_bracket=9.89e-2 s in grid mode. On
one office RTX A4000, the tracked artifact still records corresponding
full-RHS timings of 1.28e-2 s and 1.48e-2 s. Spectral mode reduces the
GPU nonlinear bracket by 1.63x, but the full GPU RHS remains faster in grid
mode because the optimized Laguerre transform removes enough layout overhead
while preserving the production grid-quadrature convention. The CPU refresh
continues to point the next optimization pass at linear-RHS fusion/cache
layout and larger-grid bracket decomposition, not at claiming a broad
nonlinear speedup from spectral mode alone.
The full fused nonlinear-RHS trace companion is generated with:
python tools/profiling/profile_runtime_kernels.py full-nonlinear-rhs \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear_miller.toml \
--ky 0.3 \
--Nl 4 \
--Nm 8 \
--repeats 5 \
--summary-json docs/_static/full_nonlinear_rhs_trace_summary.json
The tracked local CPU artifact
docs/_static/full_nonlinear_rhs_trace_summary.json reports
warm_seconds=3.35e-1 and 3343 HLO lines. The matched one-RTX-A4000
artifact docs/_static/full_nonlinear_rhs_trace_gpu_summary.json reports
warm_seconds=1.28e-2 and 3336 HLO lines. The GPU token triage is
dominated by reshapes (1545), broadcasts (1822), multiplies (871),
FFTs (229), slices (215), and reductions (132). This confirms that
the next nonlinear performance tranche should target fused layout and bracket
data movement rather than claiming a new runtime speedup from the linear-RHS
specialization alone. The same tranche removed a duplicated non-Laguerre field
mask from the nonlinear bracket path and then replaced the Laguerre-grid
moveaxis/tensordot/moveaxis transforms with precision-controlled
einsum calls. Transform-only CPU/GPU probes showed exact agreement with
the previous algebra at the tested precision; on one RTX A4000 the full fused
nonlinear-RHS trace improved from 1.49e-2 s to 1.28e-2 s while
transposes dropped from 44 to 32. This is a bounded profiler-state
source improvement, not a full transport runtime claim.
Runtime-mode stellarator RHS smoke profile
The release-performance gate also tracks W7-X and HSX at their documented
adiabatic-electron nonlinear runtime mode (Nx=96, Ny=96, Nz=48,
Nl=4, Nm=8, and the runtime k_y=1/21). These are not full
transport-average timings; they are single-state RHS split profiles used to
verify that the optimized grid-Laguerre path, VMEC/EIK geometry inputs, and
CPU/GPU hot-path accounting remain consistent on non-axisymmetric cases.
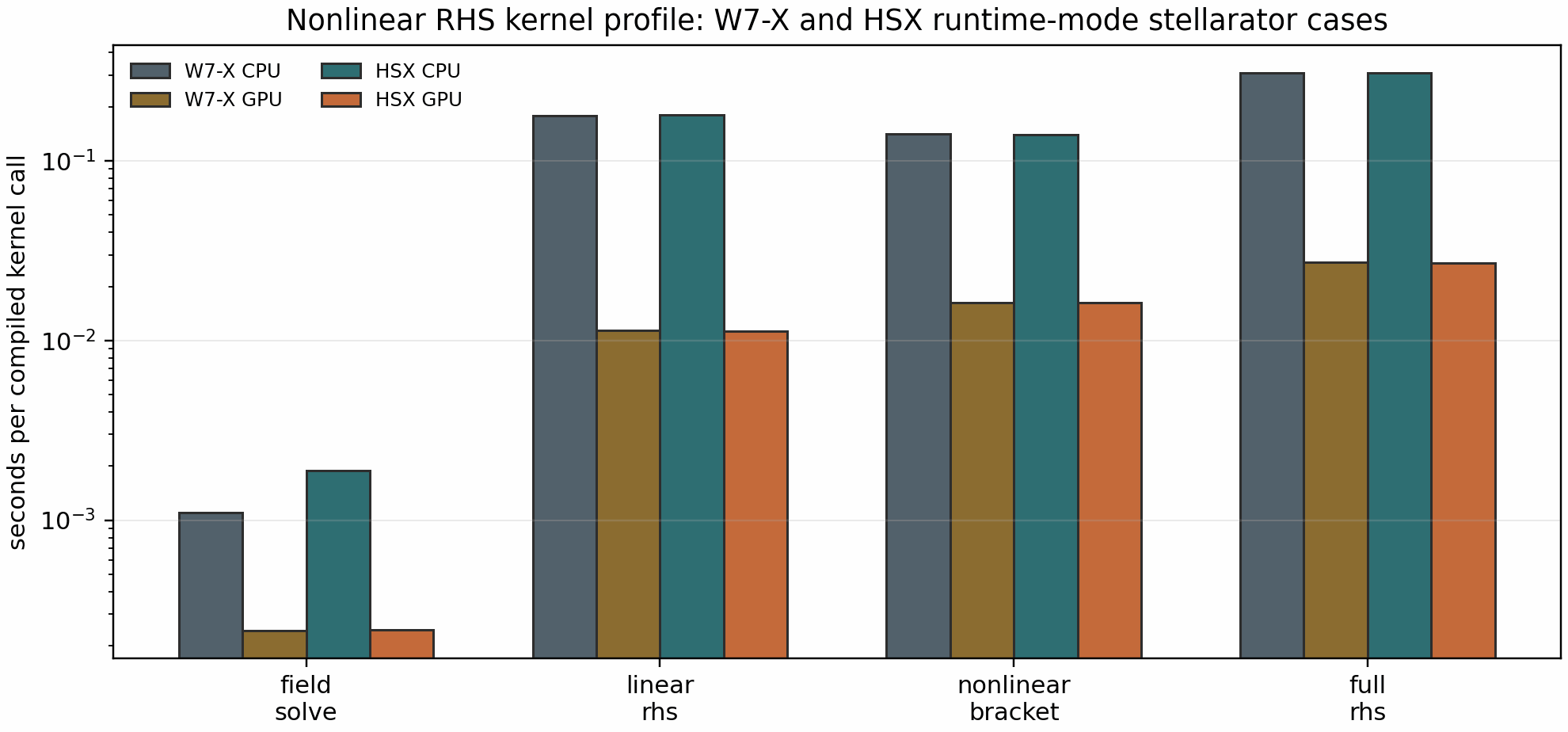
The tracked artifact
docs/_static/nonlinear_rhs_profile_stellarator_runtime.json reports W7-X
CPU/GPU full-RHS timings of 3.09e-1 s and 2.73e-2 s and HSX CPU/GPU
full-RHS timings of 3.09e-1 s and 2.71e-2 s. In both stellarator
runtime-mode profiles the GPU row is dominated by the nonlinear bracket
(~59-60% of the measured full RHS), with the linear RHS contributing
~42%. That closes the release-level performance evidence: CPU/GPU
profiler artifacts are current, the sharding identity gate is tracked, and the
documentation makes only bounded profiler claims. Further nonlinear speedup
work should target larger-state bracket/linear-RHS layout and must keep using
identity gates before any production runtime claim.
Linear RHS term profile
The linear RHS split profiler drills into the compiled linear contribution used inside nonlinear runs:
python tools/profiling/profile_linear_rhs_terms.py \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear.toml \
--ky 0.3 \
--Nl 4 \
--Nm 8 \
--repeats 8 \
--out docs/_static/linear_rhs_terms_profile_cpu.csv \
--summary-json docs/_static/linear_rhs_terms_profile.json
After the zero-collision fast path and linked-FFT refactor, the May 9, 2026
CPU Cyclone artifact reports full_linear_rhs=1.08e-1 s for the compiled
full linear RHS call in this profiling harness. The independently timed term
kernels sum to 1.68e-2 s; this remaining gap is a localization signal, not
a speedup claim, because the full path recomputes the field solve, H
assembly, and all weighted contributions as one compiled graph. The largest
standalone terms are hypercollisions (2.39e-3 s), linked |k_z| setup
(2.38e-3 s), and streaming (2.34e-3 s). The accepted
zero-collision branch now costs 1.11e-3 s in the standalone CPU timing and
is guarded by the state-window identity gate below.
The active-state CPU companion
docs/_static/linear_rhs_terms_profile_z_wave_cpu.json profiles the same
state after injecting a resolved parallel perturbation. There the hypercollision
and linked |k_z| norms are both 2.35e-4 and the linked |k_z| path
costs 2.33e-3 s on CPU. This is the artifact that should be used for
linked-|k_z| optimization decisions; the initial-state profile is only a
zero-source baseline.
For the larger Cyclone Miller benchmark-size RHS profile above, the active-state
CPU companion is
docs/_static/linear_rhs_terms_profile_miller_cpu.json. It uses the same
Nl=4, Nm=8, k_y=0.3 state as the nonlinear Miller profiler and
reports full_linear_rhs=2.93e-1 s with independently timed terms summing to
4.83e-2 s. The largest nonzero standalone row is streaming
(7.33e-3 s), followed by linked \partial_z (6.39e-3 s), linked
|k_z| (6.18e-3 s), and hypercollisions (6.20e-3 s). That keeps the
next bounded optimization focused on full-graph layout/fusion and reusable
state transforms rather than making a standalone-term speedup claim.
The matching office GPU profile is tracked in
docs/_static/linear_rhs_terms_profile_gpu.json and
docs/_static/linear_rhs_terms_profile_gpu.csv. On one RTX A4000 with the
same jax==0.6.2/jaxlib==0.6.2 environment used for the nonlinear RHS
refresh, it reports full_linear_rhs=5.50e-3 s and independently timed terms
summing to 3.41e-3 s. The accepted zero-collision branch costs
1.24e-4 s in the standalone GPU timing; hypercollisions and linked
|k_z| remain present as separately profiled rows. The active-state GPU
companion
docs/_static/linear_rhs_terms_profile_z_wave_gpu.json activates the same
operator pair with matched norms 2.35e-4 and records linked |k_z| at
3.63e-4 s with full_linear_rhs=5.48e-3 s.
The companion state-window gate is generated with:
python tools/artifacts/generate_linear_rhs_parallel_gates.py zero-norm-state-window \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear.toml \
--ky 0.3 \
--Nl 4 \
--Nm 8 \
--out-json docs/_static/linear_rhs_zero_norm_state_window_gate.json
The current gate passes by accepting the zero-collision skip for this
nu=0 Cyclone window while rejecting a hypercollision skip: the initial
state has zero relative hypercollision skip error, but the resolved
z-varying state reaches 3.59e-3. This protects the optimization path
from incorrectly disabling linked |k_z| hypercollisions based only on the
initial-state profile.
Full fused linear RHS trace
The term profiler above times independently isolated kernels. The companion
full-graph profiler lowers and times the production linear_rhs_cached entry
point for a real runtime TOML so optimization work can target the compiled
graph seen by executable linear runs rather than only the standalone assembly
helper:
python tools/profiling/profile_runtime_kernels.py full-linear-rhs \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear_miller.toml \
--ky 0.3 \
--Nl 4 \
--Nm 8 \
--repeats 3 \
--summary-json docs/_static/full_linear_rhs_trace_summary.json
The May 11, 2026 local CPU production-path artifacts record
source="spectraxgk.linear.linear_rhs_cached" and
force_electrostatic_fields=true. The initial-state companion reports
warm_seconds=1.54e-1 and compile_execute_seconds=1.02. The active
z_wave companion injects resolved parallel variation and reports
warm_seconds=8.38e-2 with the same specialized HLO shape. Both summaries
contain 2779 HLO lines and highlight the remaining graph-level pressure
points: broadcasts (983 coarse token hits), reshapes (578), FFT
mentions (312), reductions (316), multiplies (200), and gathers
(51). These are localization metrics, not standalone runtime claims. The
source-path change means these artifacts should be compared against future
production-path refreshes, not against older lower-level assembly-helper
artifacts.
The May 11, 2026 one-RTX-A4000 production-path artifacts
docs/_static/full_linear_rhs_trace_gpu_summary.json and
docs/_static/full_linear_rhs_trace_gpu_z_wave_summary.json report
source="spectraxgk.linear.linear_rhs_cached", 2779 HLO lines, and
force_electrostatic_fields=true. The initial and active z_wave states
measure warm_seconds=5.13e-3 and 5.15e-3, respectively. These GPU
artifacts show that the production linear-RHS path remains about five
milliseconds on one RTX A4000 for this benchmark-size RHS call, but they remain
kernel-localization evidence rather than a full nonlinear runtime claim.
Parallelization scaling guardrail
The earlier two-device linear scaling figure remains an engineering artifact, not
the headline production parallelization claim. Current user-facing scaling
claims should point to the independent k_y scan and quasilinear/UQ ensemble
figures below, because those paths preserve serial ordering and have explicit
solver-observable identity gates.
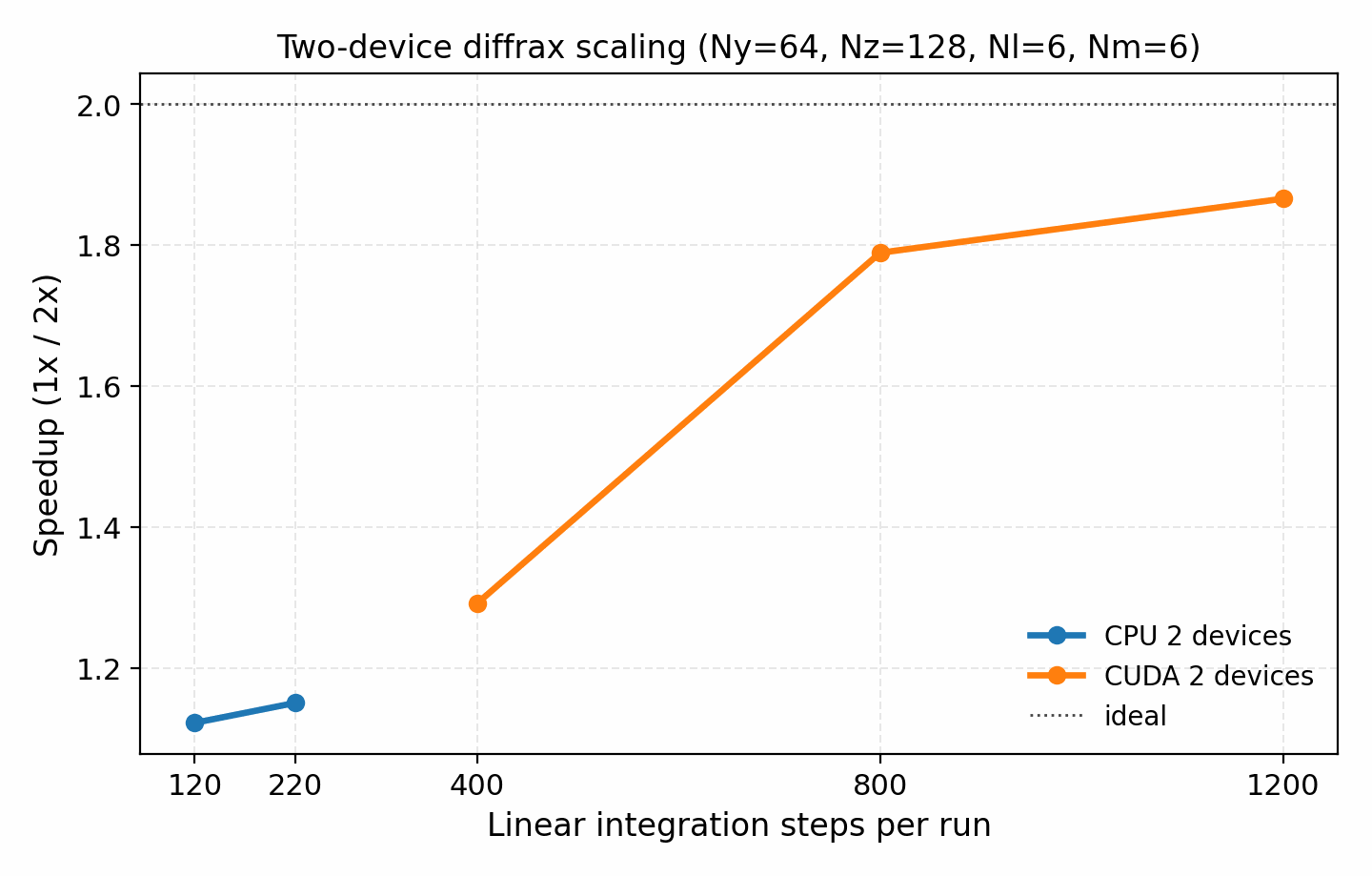
The raw sweep data lives in docs/_static/scaling_speedup_data.csv and can
be replotted with:
python tools/artifacts/plot_scaling_panels.py diffrax-speedup
The exploratory distributed-RK2 strong-scaling data is still tracked for engineering work, but it is intentionally not presented as a headline publication figure because the current curve is dominated by communication overhead rather than near-ideal scaling.
Production parallelization should start with independent work rather than
nonlinear domain decomposition. The public helpers
spectraxgk.ky_scan_batches and spectraxgk.batch_map split k_y
scans, quasilinear/UQ ensembles, and sensitivity-sweep workloads while
preserving serial ordering.
On one device they reduce to batched vmap execution; on multiple devices
they use JAX device batching and trim padded edge samples deterministically.
Every performance claim from this path should include a numerical-identity
gate against the serial result before a speedup plot is promoted.
For the release-scale CPU/GPU panels below, the acceptance contract is
machine-checkable: the combined *_large artifact must cite split CPU and
GPU JSON/CSV/PNG/PDF companions, each split artifact must include the grid,
warmup/repeat policy, backend/device counts, positive timing samples, and
per-row identity results, and any speedup statement must name the artifact that
supports it. Whole-state nonlinear sharding uses the same large-run artifact
shape, but its timing ratios remain profiler evidence and not a production
nonlinear speedup claim unless a future matched workload refresh adds the
missing identity, full nonlinear communication, transport-window, and profiler
promotion gates.
The first release-grade gate for this policy is a real Cyclone linear
k_y-scan comparison:
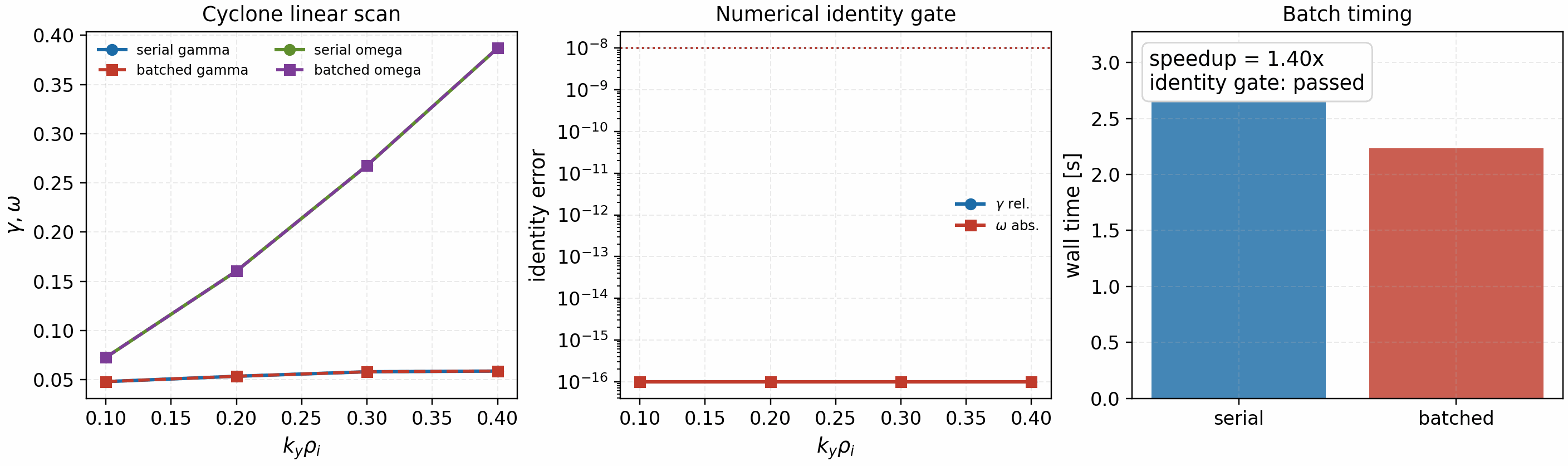
It is regenerated with:
python tools/artifacts/generate_parallel_identity_gate.py ky-scan
This gate runs the same linear solver serially and with fixed-shape
k_y batching, checks gamma and omega numerical identity, and
reports observed speedup as an engineering metric. The gate intentionally does
not claim nonlinear domain scaling; that remains a separate communication and
FFT-decomposition problem.
The complementary logical-CPU gate exercises the public
RuntimeParallelConfig and batch_map interface on a structured JAX
pytree output. It is not a gyrokinetic physics validation; it verifies that the
parallel API preserves serial numerical identity for independent scan/UQ-style
workloads before those workloads are connected to heavier solver paths.
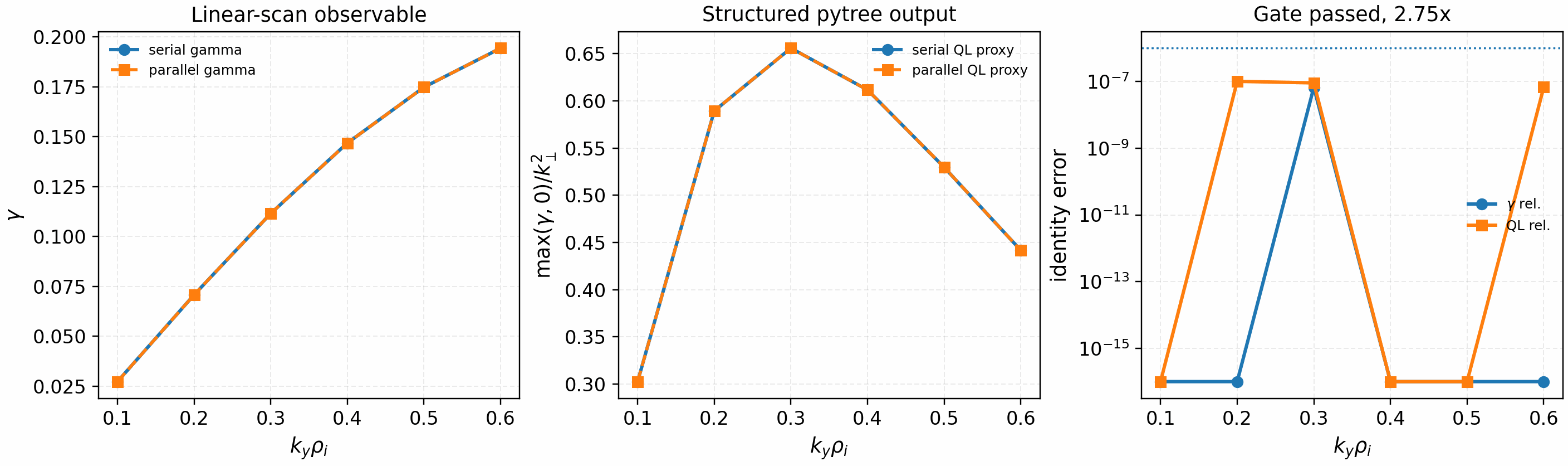
It is regenerated with:
python tools/artifacts/generate_parallel_identity_gate.py logical-cpu --logical-devices 2
The tracked artifact used two logical CPU devices and passed the identity gate:
max_gamma_rel_error=6.7e-8, max_ql_rel_error=1.1e-7, and
max_omega_abs_error=0. The observed timing is retained as engineering
metadata only; a speedup claim requires a solver-backed workload and fresh
CPU/GPU profiler artifacts.
The solver-backed strong-scaling artifact now exercises that production
policy on a larger real Cyclone linear scan with 64 independent
k_y values, Ny=128, Nz=96, Nl=4, Nm=8, and 240 RK2
steps per mode. Each worker performs one warmup scan before the timed repeats,
and every multi-worker result is compared against the one-worker reference for
gamma and omega identity:
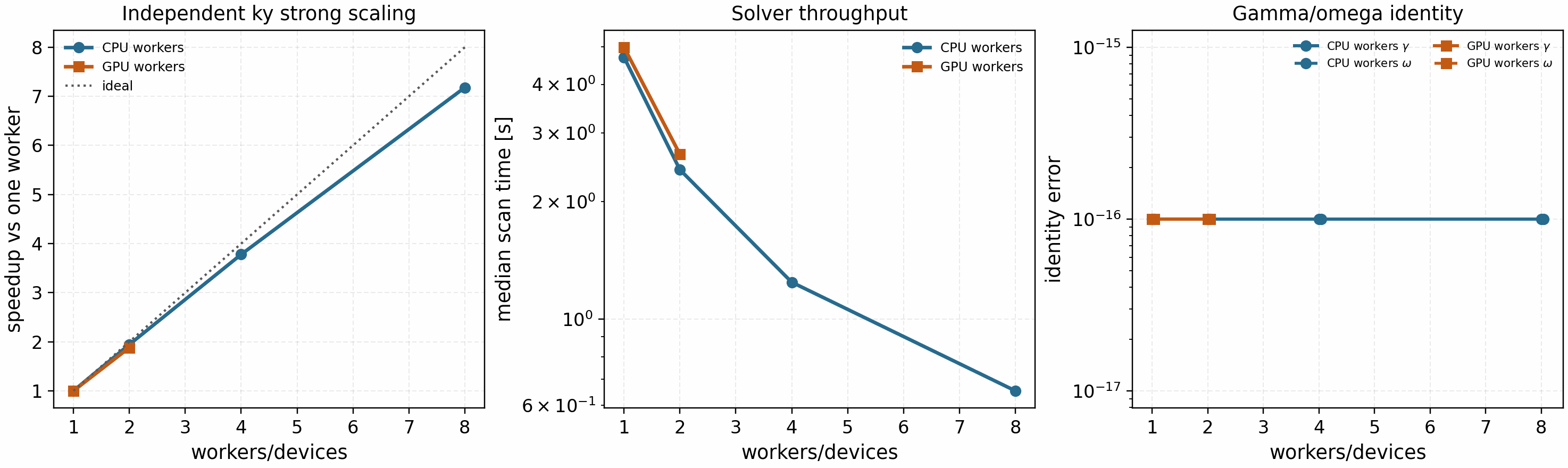
It is regenerated with:
KY=$(python -c "print(','.join(f'{0.04 + 0.0125*i:.3f}' for i in range(64)))")
python tools/profiling/profile_parallel_workloads.py independent-ky \
--backend cpu --devices 1,2,4,8 \
--ky "$KY" \
--ny 128 --nz 96 --nl 4 --nm 8 --steps 240 \
--out-prefix docs/_static/independent_ky_scan_scaling_cpu_large
python tools/profiling/profile_parallel_workloads.py independent-ky \
--backend gpu --devices 1,2 \
--ky "$KY" \
--ny 128 --nz 96 --nl 4 --nm 8 --steps 240 \
--out-prefix docs/_static/independent_ky_scan_scaling_gpu_large
python tools/artifacts/plot_scaling_panels.py independent-ky
The May 12, 2026 refresh passes the identity gate with zero reported
gamma/omega mismatch. CPU process scaling reaches 1.94x on two
workers, 3.78x on four workers, and 7.18x on eight workers. The
two-GPU RTX A4000 run reaches 1.88x with about 94% parallel
efficiency. This is the current recommended production parallelization path
for linear scans, quasilinear studies, and UQ ensembles: it has much better
scaling behavior than whole-state nonlinear sharding because communication is
restricted to post-run result aggregation. Sensitivity sweeps are covered by
the same ordering/provenance utilities, but need their own scaling artifact
before any speedup claim is promoted.
The release closure status is machine-readable and separates production claims from diagnostic decomposition work:
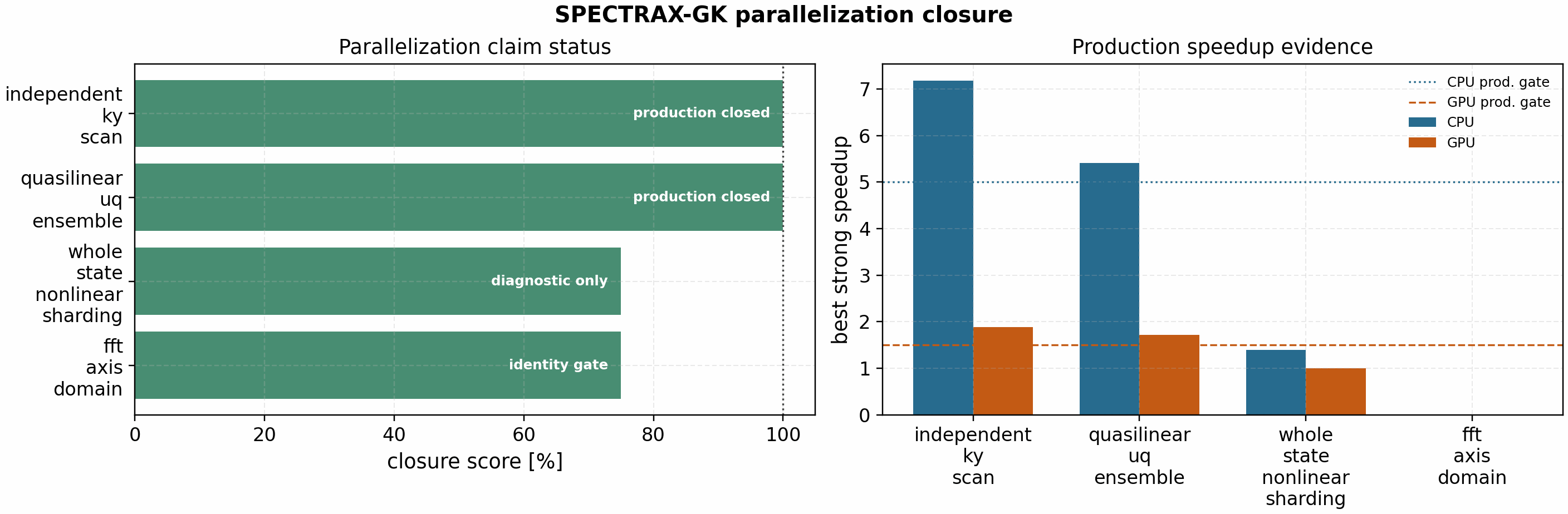
It is regenerated with:
python tools/artifacts/build_parallelization_completion_status.py
The tracked docs/_static/parallelization_completion_status.json reports
production_completion_percent = 100 for independent k_y scans and
quasilinear/UQ ensembles. The same artifact keeps whole-state nonlinear
sharding and FFT-axis decomposition at diagnostic status until runtime
distributed communication, conservation, transport-window, and profiler-backed
speedup gates are closed.
The nonlinear state-domain prototype now has a stronger diagnostic gate in
docs/_static/nonlinear_domain_parallel_identity_gate.json. In addition to
the one-step serial-vs-halo-decomposed state check, the embedded
nonlinear_domain_transport_window_identity report advances a short
fixed-step window and compares boundary identity plus mass, free-energy-proxy,
and boundary-flux-proxy traces. Those trace drifts are agreement metadata for
the diagnostic local stencil only. They do not validate production conservation,
distributed FFT routing, field solves, benchmark transport windows, or any
speedup claim.
The tracked spectral-domain routing profile adds a work model for the current
global-reconstruction diagnostic route. It passes serial-vs-routed identity,
but the four-tile profile reports communication/owned-work ratio 6.375, a
parallel-efficiency ceiling 0.136, and measured warm timing 0.94x. This
is negative performance evidence for the current route and points to the
actual implementation target: avoid global state/bracket reconstruction by
using a communication-aware distributed FFT and fused nonlinear-bracket route.
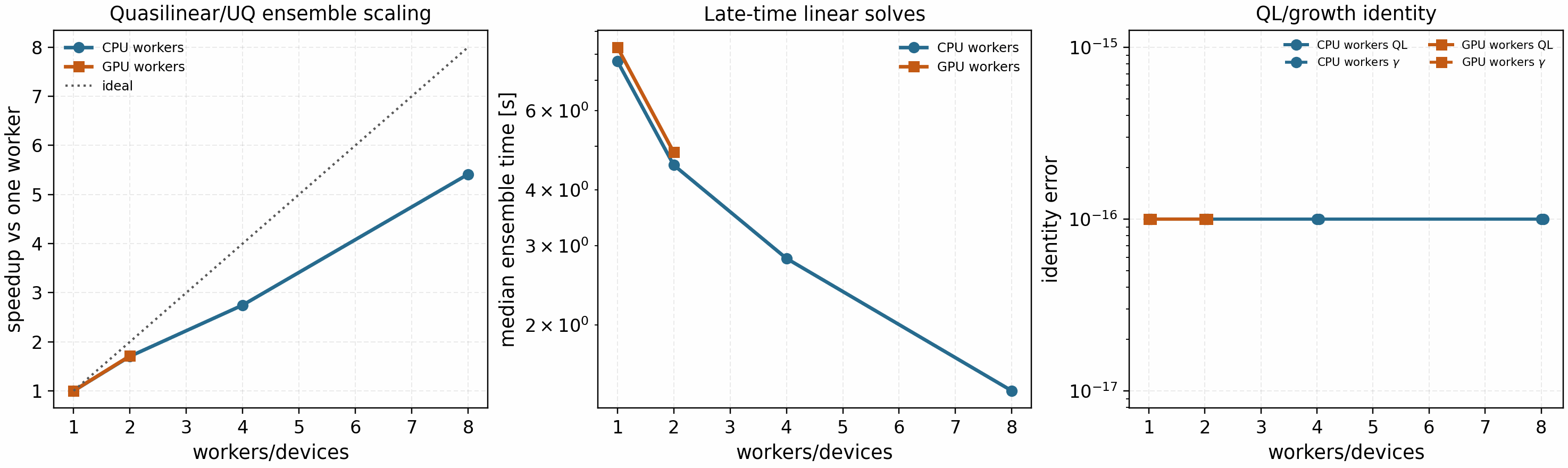
The same independent-worker policy is also gated on a quasilinear/UQ-style
ensemble: six late-time Cyclone ITG gradient samples, five k_y values per
sample, Ny=96, Nz=64, Nl=3, Nm=6, and 2000 RK2 steps per
mode. Each worker computes real late-time linear growth/frequency fits and a
reduced mixing-length feature observable. The observable is useful for
parallelization and UQ plumbing, but it is not promoted as an absolute
nonlinear heat-flux predictor.
It is regenerated with:
python tools/profiling/profile_parallel_workloads.py quasilinear-uq \
--backend cpu --devices 1,2,4,8 \
--out-prefix docs/_static/quasilinear_uq_ensemble_scaling_cpu_large
python tools/profiling/profile_parallel_workloads.py quasilinear-uq \
--backend gpu --devices 1,2 \
--out-prefix docs/_static/quasilinear_uq_ensemble_scaling_gpu_large
python tools/artifacts/plot_quasilinear_diagnostics.py uq-ensemble-scaling
The May 10, 2026 office sweep passes the serial identity gate for both the
reduced quasilinear proxy and gamma. The CPU run reaches 1.70x on two
workers, 2.75x on four workers, and 5.41x on eight requested workers
using six actual ensemble chunks. The two-GPU RTX A4000 run reaches 1.71x
with about 86% parallel efficiency. This closes the release engineering
gate for quasilinear calibration grids, finite-difference checks, sensitivity
sweeps, and UQ ensembles that can be decomposed into independent solver calls.
Nonlinear-decomposition promotion follows the same conservative rule.
spectraxgk.build_velocity_sharding_plan records a species-first,
Hermite-second velocity-space layout, including which axes need Hermite ghost
exchange and which axes need field-solve reductions and broadcasts. Periodic
and linked 2 species x 2 Hermite electrostatic operator routes now pass
identity gates, but their communication evidence does not establish nonlinear
transport speedup. Mixed electromagnetic integration and profiler-backed
four-device evidence remain required before broadening that claim.
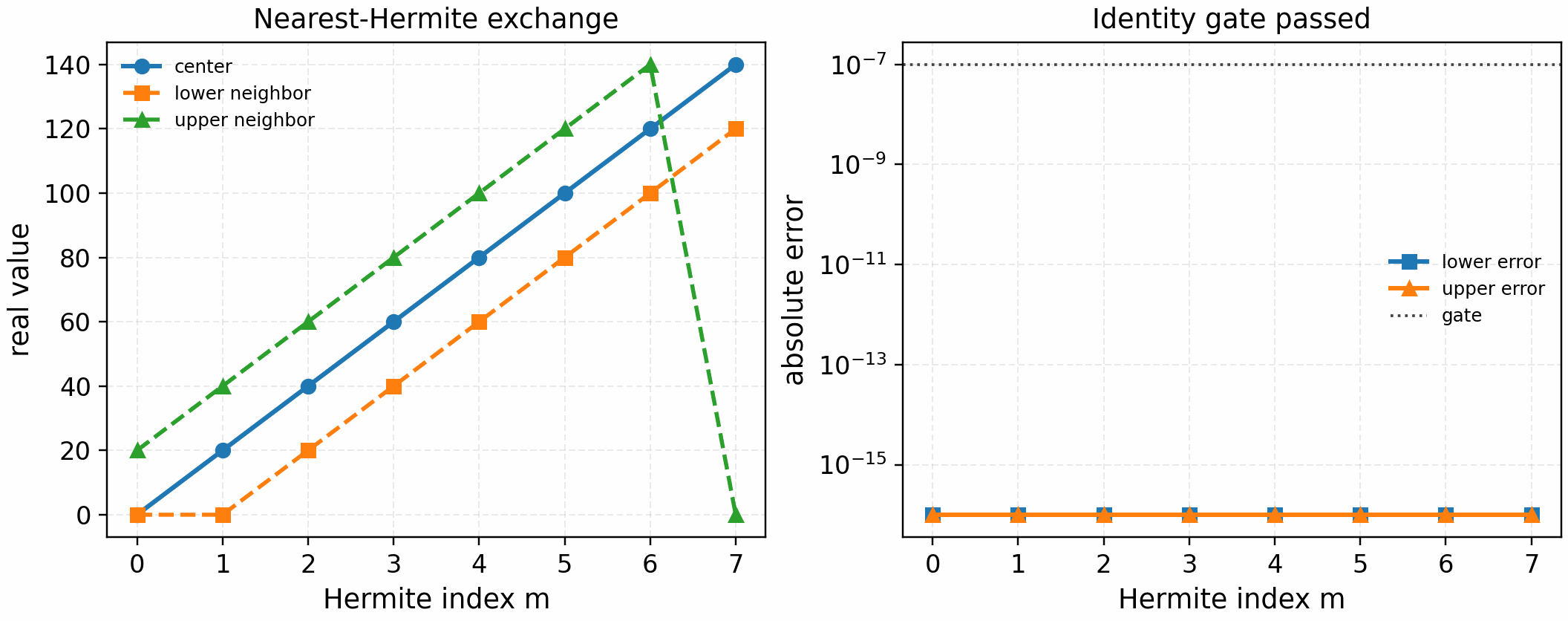
The first concrete communication-kernel gate is the Hermite ghost exchange.
It uses jax.shard_map to exchange nearest-neighbor Hermite moments across a
two-device logical CPU mesh and compares the result against the full-array
reference shift with zero physical boundaries:
It is regenerated with:
python tools/artifacts/generate_velocity_parallel_gates.py hermite-exchange --logical-devices 2
The tracked artifact passes with zero reported lower/upper neighbor error. It only validates the communication primitive. Promoting nonlinear velocity-space decomposition beyond diagnostic evidence still needs field-reduction/broadcast gates, streaming-operator identity gates, full-RHS identity gates, and profiler artifacts before any speedup claim.
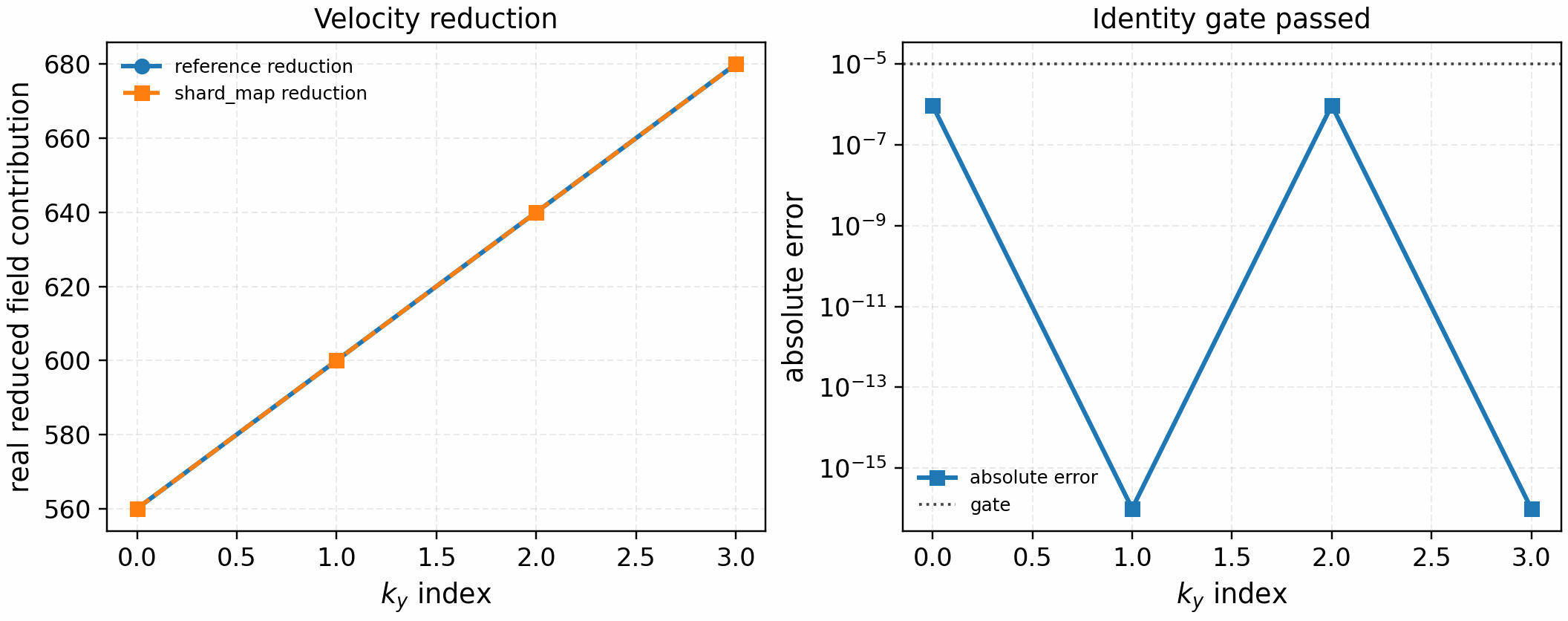
The matching velocity-space field-reduction gate validates the second required
communication primitive. It reduces the Hermite-sharded local contributions
with lax.psum and compares against the full-array reference sum:
It is regenerated with:
python tools/artifacts/generate_velocity_parallel_gates.py field-reduce --logical-devices 2
The tracked artifact passes with max_abs_error=3.9e-6 under an absolute
tolerance of 1e-5. This tolerance reflects expected float32 roundoff from a
different reduction tree; it is not a physics tolerance. The next gate must
combine Hermite exchange and field reduction with the actual streaming
coefficients.
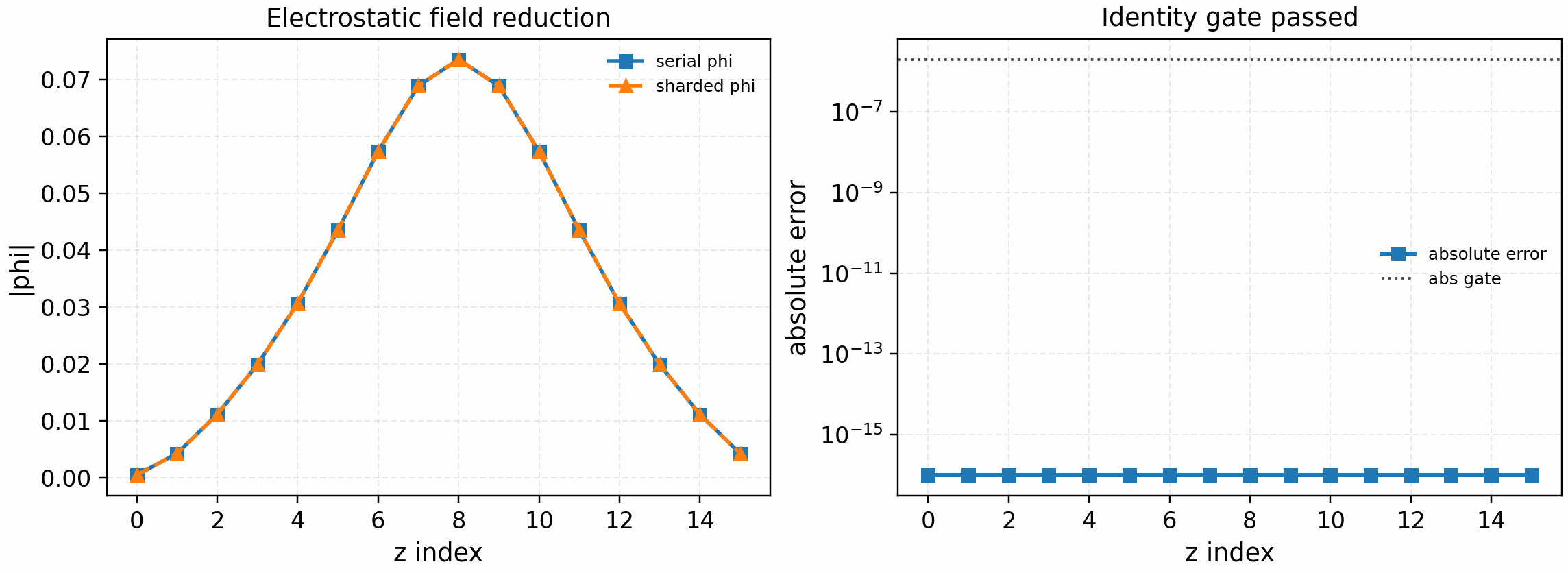
The electrostatic field-reduction gate applies the same lax.psum pattern
to the actual m=0 density moment used by quasineutrality and compares the
resulting phi against the production field solve:
It is regenerated with:
python tools/artifacts/generate_electrostatic_parallel_gates.py field-reduce --logical-devices 2
The tracked artifact passes exactly on the current single-species periodic
gate with phi_norm=1.68e-1 and zero reported absolute/relative error. This
is the first true sharded field-reduction solve gate; multi-species,
linked-boundary, electromagnetic, and nonlinear field solves remain separate
gates.
That coefficient gate is now tracked separately. It applies the
sqrt(m+1) upper-neighbor and sqrt(m) lower-neighbor Hermite streaming
ladder on top of the shard-map exchange and records the paired field-reduction
error:
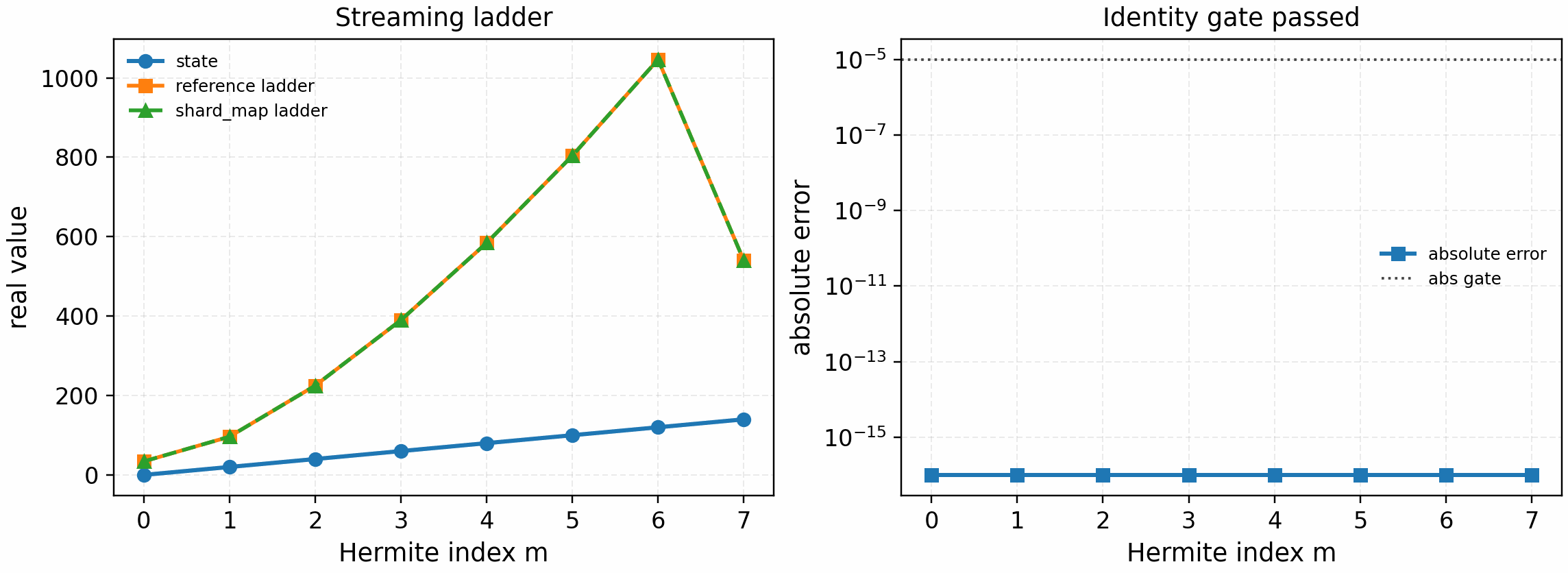
It is regenerated with:
python tools/artifacts/generate_velocity_parallel_gates.py hermite-ladder --logical-devices 2
The tracked artifact passes with zero ladder error and records an accompanying
Hermite field-reduction error of 1.9e-6. This closes the communication and
coefficient layer for a one-dimensional Hermite mesh. The next step is an
opt-in linear streaming microkernel that includes the actual parallel
derivative contract.
The electrostatic drift-slice gate then uses offset-1 and offset-2 Hermite exchanges for mirror and curvature terms, together with the electrostatic field-reduction gate:
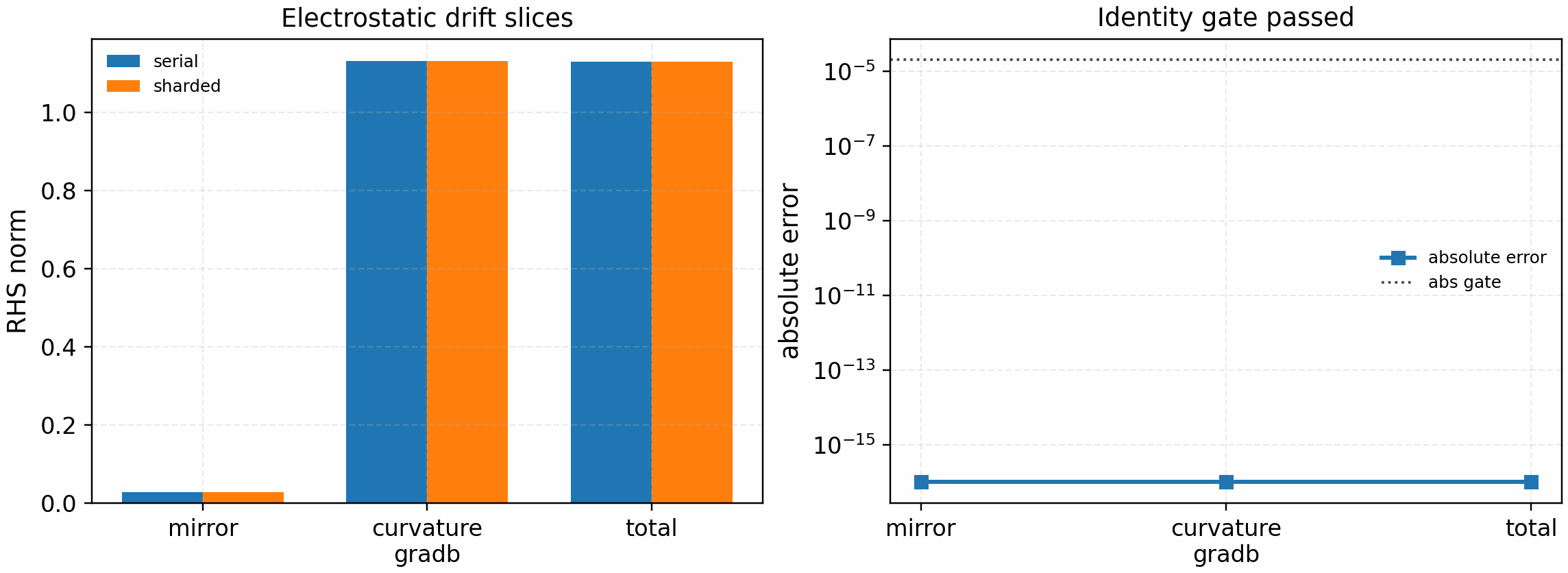
It is regenerated with:
python tools/artifacts/generate_electrostatic_parallel_gates.py drift --logical-devices 2
The tracked artifact passes with phi_norm=1.21e-1 and zero reported
absolute/relative error for the mirror, curvature/grad-B, and combined drift
slices. This is a single-species periodic electrostatic identity gate, not a
full-RHS, linked-boundary, electromagnetic, or nonlinear performance claim.
The gated slices are available together through
spectraxgk.linear_rhs_parallel_cached with
RuntimeParallelConfig(strategy="velocity", axis="hermite",
backend="electrostatic_linear_slices").
The electrostatic diamagnetic-drive gate validates the remaining local
electrostatic drive slice. It uses the Hermite-sharded electrostatic field
reduction, then applies the local m=0 and m=2 density/temperature
gradient masks on each Hermite shard:
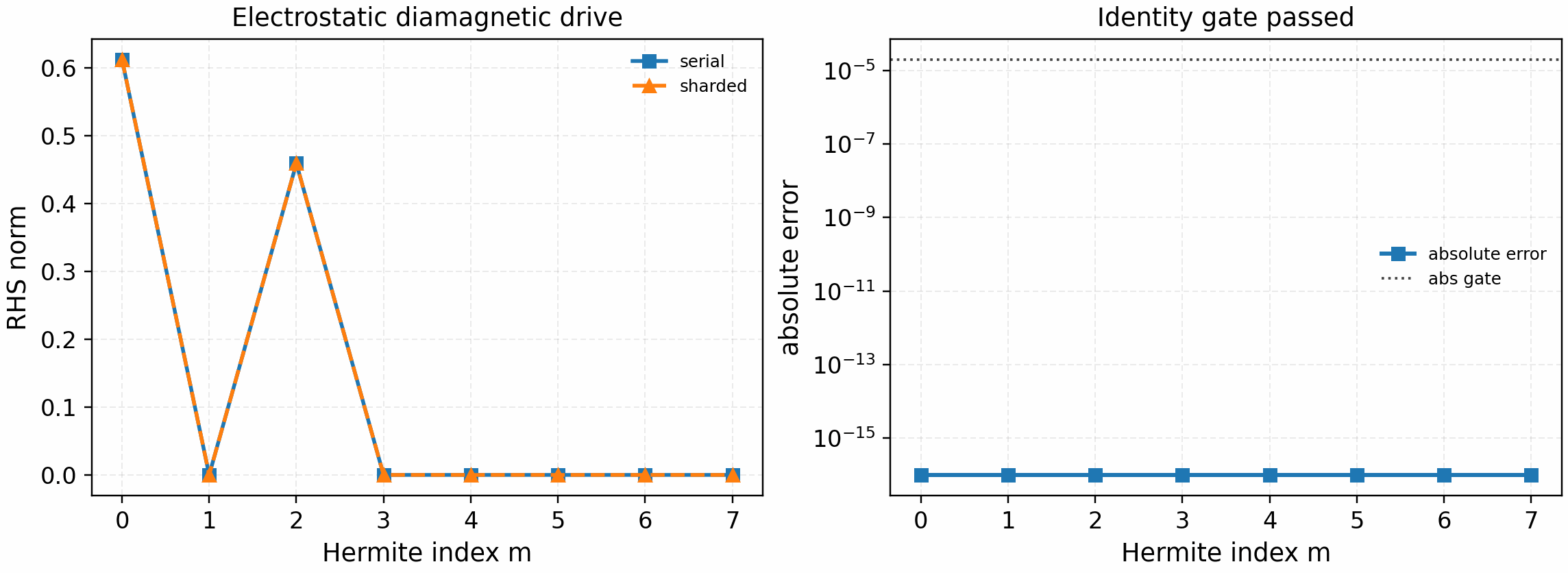
It is regenerated with:
python tools/artifacts/generate_electrostatic_parallel_gates.py diamagnetic --logical-devices 2
The tracked artifact passes with phi_norm=1.68e-1 and zero reported
absolute/relative error against the production diamagnetic-only linear RHS.
The opt-in backend="electrostatic_linear_slices" route now combines
streaming, mirror, curvature, grad-B, and diamagnetic slices. It still rejects
collision, electromagnetic, linked-boundary, multi-species, and nonlinear
terms until each path has its own identity gate.
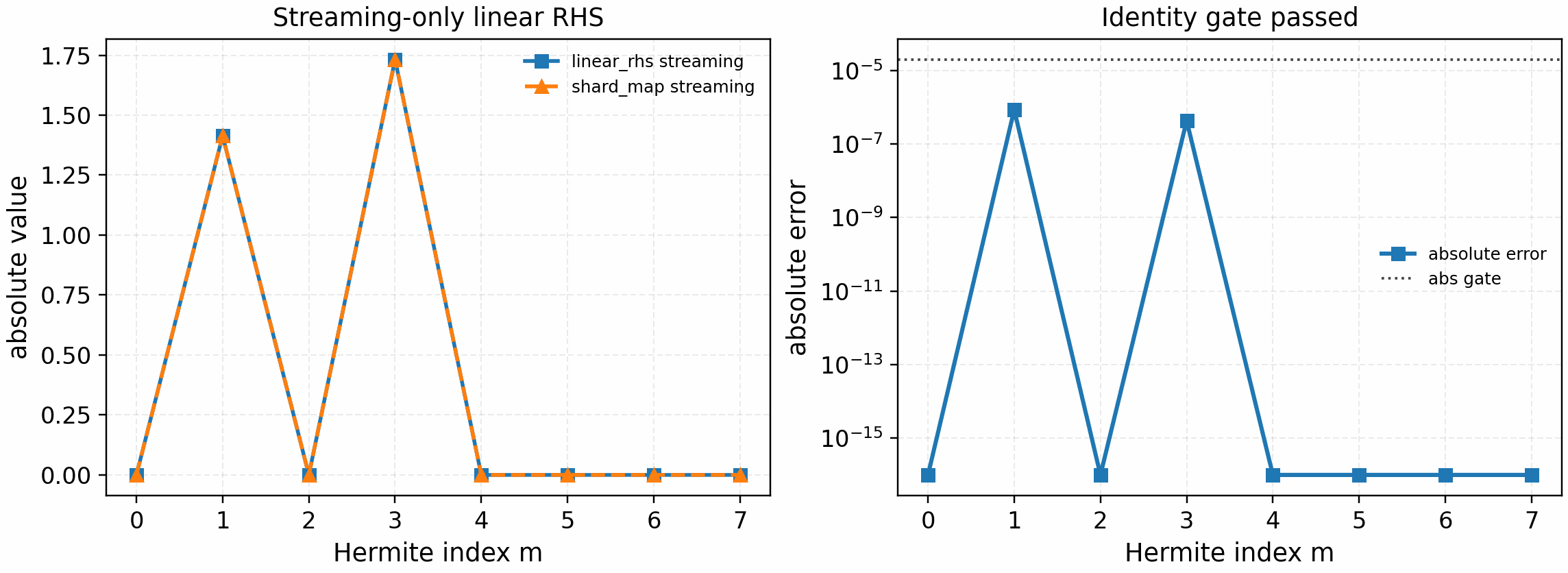
The periodic linear-streaming microkernel gate then adds the spectral
parallel derivative along the field-line direction and compares the resulting
shard_map path directly against the production
spectraxgk.operators.linear.streaming.streaming_ladder_term:
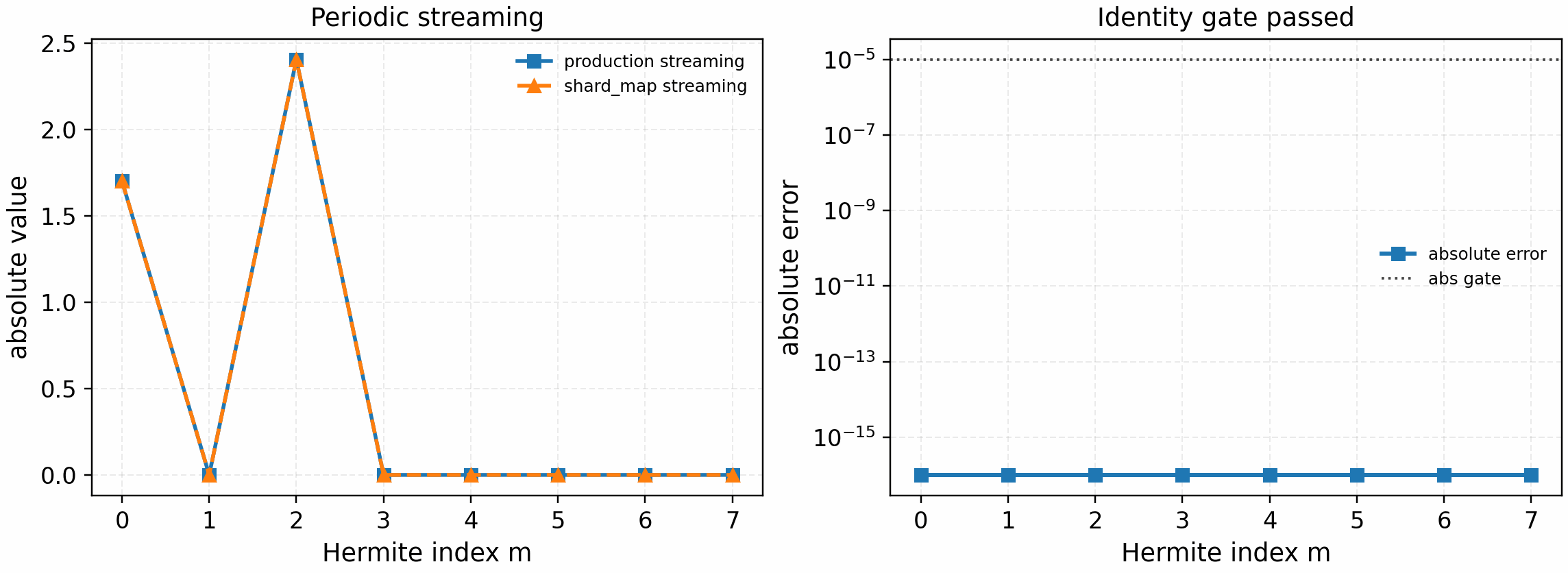
It is regenerated with:
python tools/artifacts/generate_velocity_parallel_gates.py periodic-streaming --logical-devices 2
The tracked artifact passes with zero reported absolute and relative error. This is still a linear streaming microkernel gate, not a full linear RHS or nonlinear performance claim.
The next release gate exercises the same periodic streaming path through the
production linear_rhs_cached call graph. The artifact disables all
non-streaming terms, keeps electromagnetic channels off, and uses non-density
Hermite moments so that the electrostatic field solve is exactly zero:
It is regenerated with:
python tools/artifacts/generate_linear_rhs_parallel_gates.py streaming --logical-devices 2
The tracked artifact passes with max_abs_error=9.7e-7,
max_rel_error=5.6e-7, and phi_norm=0. This closes a streaming-only
linear-RHS identity gate. It deliberately does not claim full-RHS, nonlinear,
or production speedup parity; those remain separate gates with additional
field-solve, drive, collision, bracket, and profiler coverage.
For code-level experiments the same route is available through
spectraxgk.linear_rhs_parallel_cached with
RuntimeParallelConfig(strategy="velocity", axis="hermite",
backend="streaming_only"). The helper rejects any non-streaming term weights
so this remains a disabled-by-default diagnostic path rather than a hidden
solver change.
The follow-on electrostatic streaming gate keeps the term weights identical
but initializes an m=0 density perturbation so that the production
electrostatic field solve produces nonzero phi. It then compares
linear_rhs_cached against the explicit
backend="streaming_electrostatic" route:
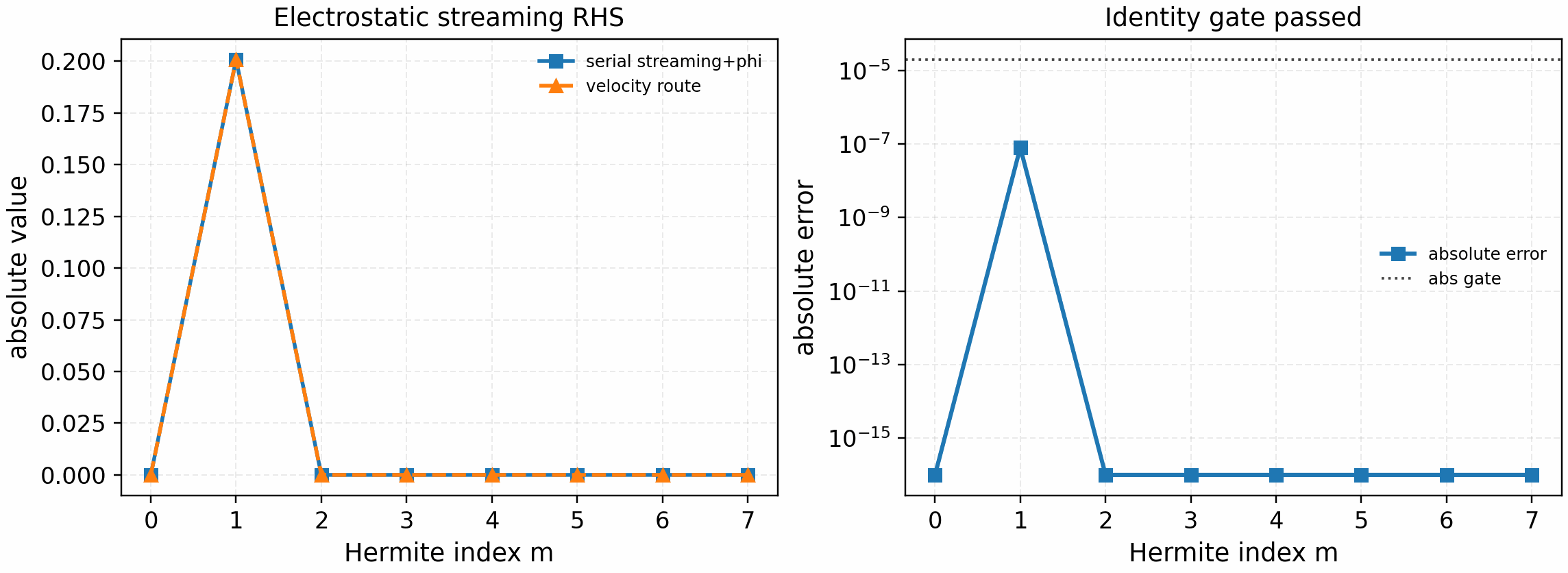
It is regenerated with:
python tools/artifacts/generate_linear_rhs_parallel_gates.py streaming-electrostatic --logical-devices 2
The tracked artifact passes with phi_norm=1.34e-1,
max_phi_abs_error=1.9e-9, max_abs_error=1.4e-7, and
max_rel_error=4.1e-7. The field solve uses the single-species
Hermite-sharded electrostatic reduction gate above; this validates the
field-reduction-to-streaming call graph before the drift, diamagnetic-drive,
and nonlinear paths are introduced.
The current composed electrostatic linear-RHS gate then exercises the opt-in
backend="electrostatic_linear_slices" route against the serial production
RHS with streaming, mirror, curvature, grad-B, and diamagnetic drive enabled:
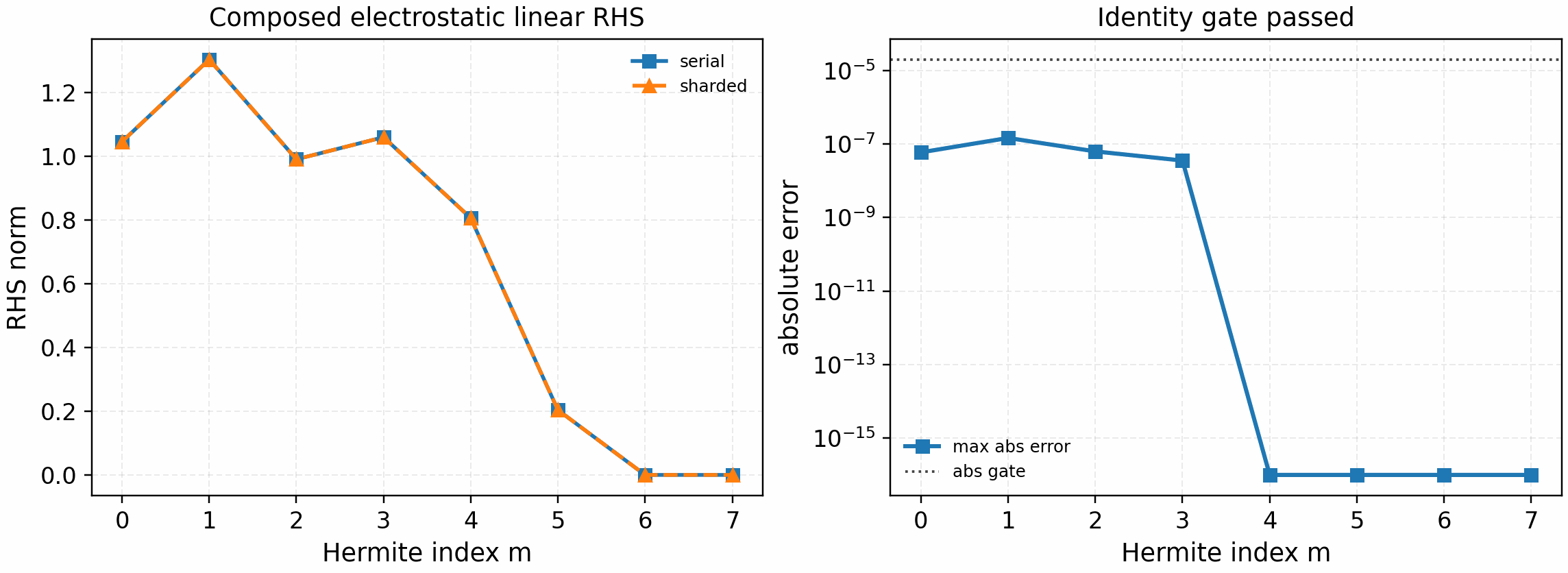
It is regenerated with:
python tools/artifacts/generate_linear_rhs_parallel_gates.py electrostatic-slices --logical-devices 2
The tracked artifact passes with phi_norm=1.68e-1,
max_abs_error=1.5e-7, max_rel_error=3.7e-7, and zero reported
electrostatic-potential error. This is the current single-species periodic
electrostatic linear-RHS identity gate for velocity-space parallelization. It
is not a linked-boundary, collision, electromagnetic, nonlinear, or speedup
claim.
The matching engineering profile intentionally stays separate from the identity gate:
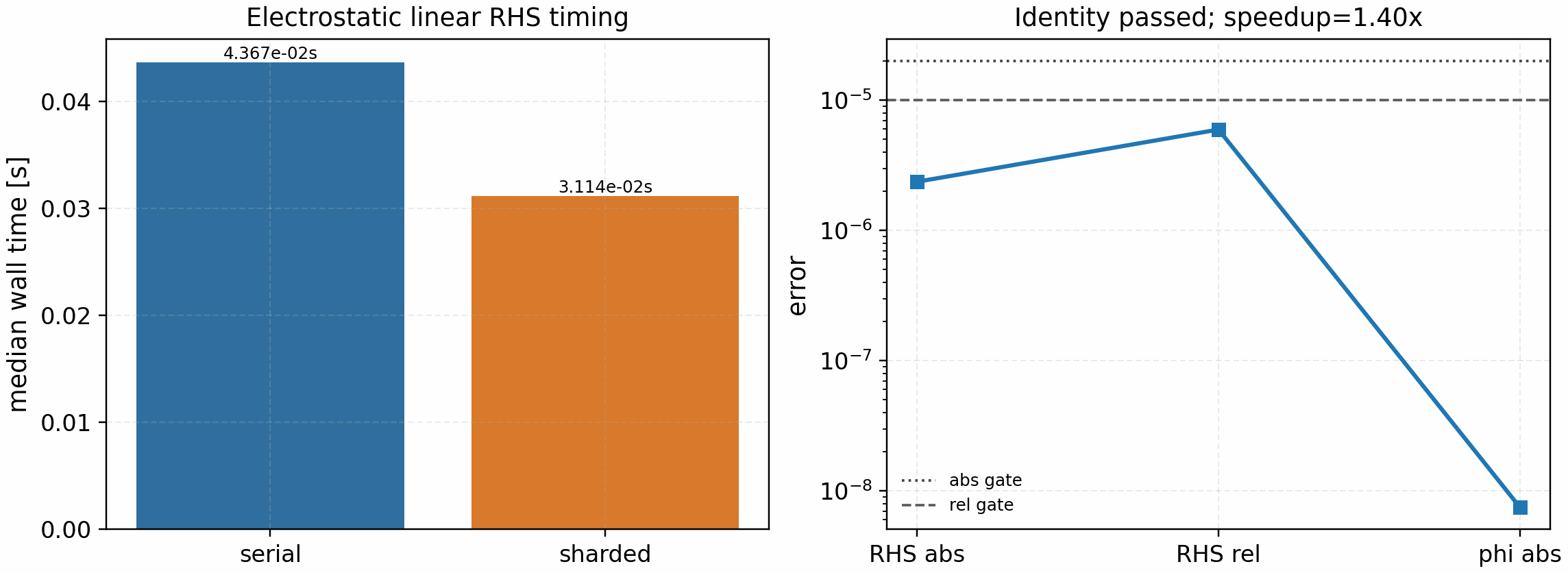
It is regenerated with:
python tools/profiling/profile_linear_rhs_parallel_slices.py \
--logical-devices 8 --nl 4 --nm 128 --ny 32 --nz 128 --rtol 1e-5
The tracked CPU artifact uses a Hermite-heavy workload and keeps the sharded
route within a float32 reduction-order engineering tolerance:
max_abs_error=2.4e-6, max_rel_error=6.0e-6, and
max_phi_abs_error=7.5e-9. The warm timings are
serial_median_s=4.37e-2, sharded_median_s=3.11e-2, and
speedup=1.40x on eight logical CPU devices. This remains an engineering
profile rather than a publication speedup claim; the stricter small-grid
identity gate above is the release correctness gate.
A compact CPU sweep maps the same opt-in route across Hermite resolution and logical device count:
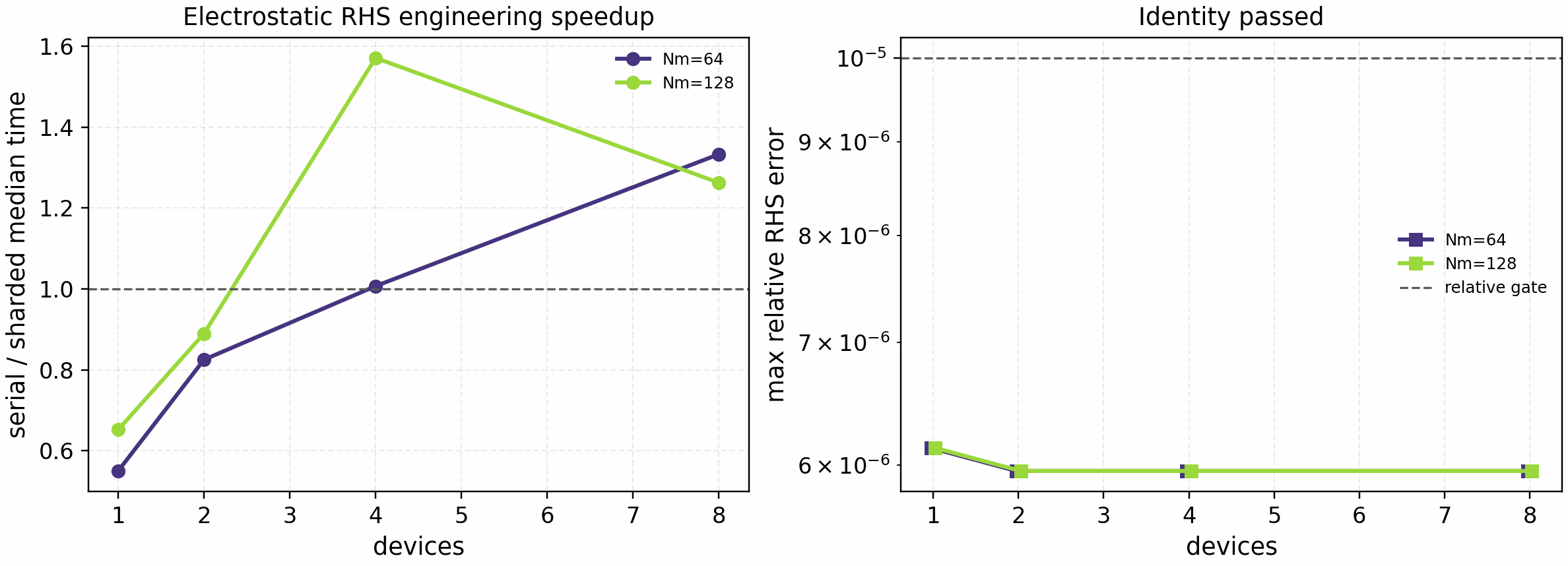
It is regenerated with:
python tools/profiling/profile_linear_rhs_parallel_slices.py sweep \
--platform cpu --devices 1,2,4,8 --nms 64,128 \
--nl 4 --ny 32 --nz 128 --rtol 1e-5
The tracked sweep passes identity for all points. It shows the current
Hermite-sharded electrostatic route is overhead-limited at one and two logical
CPU devices, becomes competitive near four devices, and reaches the best
bounded engineering point of 1.57x at Nm=128 on four logical CPU
devices. This figure is a regime map for development, not a broad scaling
claim. The machine-readable release contract is
docs/_static/linear_rhs_parallel_slices_sweep.json with CSV/PNG/PDF
companions.
The same profiler can target GPUs on the office node:
PYTHONPATH=/tmp/spectrax-gk-profile/src python3 \
tools/profiling/profile_linear_rhs_parallel_slices.py \
--platform gpu --logical-devices 2 \
--nl 4 --nm 64 --ny 32 --nz 128 --rtol 1e-5 \
--out-prefix docs/_static/linear_rhs_parallel_slices_profile_gpu
The tracked two-RTX-A4000 artifact passes the engineering identity check
(max_abs_error=1.9e-6, max_rel_error=4.7e-6), but it is much slower
than the single-GPU serial JIT path (speedup=0.03x). This keeps the GPU
Hermite-sharding lane open: do not claim GPU speedup until the communication
layout is redesigned or a larger production workload shows a real gain.
The species-first kinetic-electron route uses the same profiler with
--axis species. The tracked two-A4000, 2x8x32x128x1x128 state passes the
host-reduced identity gate with max_rel_error=5.26e-8 and
max_phi_abs_error=6.59e-10. Its warm medians are 8.21 ms on one GPU and
7.11 ms on two GPUs, a scoped 1.16x speedup. The smaller
2x4x16x64x1x64 engineering probe was slower on two GPUs, so this is a
large-workload crossover result, not a broad strong-scaling claim. The evidence
is retained in docs/_static/linear_rhs_species_profile_gpu.json and is
regenerated with:
python tools/profiling/profile_linear_rhs_parallel_slices.py \
--axis species --platform gpu --logical-devices 2 \
--nl 8 --nm 32 --ny 128 --nz 128 --warmups 2 --repeats 10 \
--out-prefix /tmp/linear_rhs_species_profile_gpu
The same profiler can include a full fixed-step integration gate with
--integration-steps. The tracked two-logical-CPU artifact uses 100 Euler
steps on a 2x4x16x64x1x64 state. The enclosing pmap agrees exactly with
serial state and field histories. After removing replicated field-history
output and aligning sampled diagnostics with the serial policy, the refreshed
artifact reaches 3.41x for isolated RHS calls and 0.96x for the complete
100-step trajectory. It therefore remains a correctness and crossover
artifact, not an end-to-end speedup claim. It is stored in
docs/_static/linear_rhs_species_profile_cpu.json and regenerated with:
python tools/profiling/profile_linear_rhs_parallel_slices.py \
--axis species --platform cpu --logical-devices 2 \
--nl 4 --nm 16 --ny 64 --nz 64 --warmups 2 --repeats 5 \
--integration-steps 100 --integration-repeats 5 \
--integration-sample-stride 1 \
--out-prefix /tmp/linear_rhs_species_profile_cpu
An uncontended two-GPU integration artifact is still required before promoting an end-to-end species-parallel speedup; concurrent office workloads invalidated the available timing samples but not their host-reduced identity checks.
The mixed species–Hermite profile uses four logical CPU devices. On the
periodic collision-free electrostatic 2x4x16x64x1x64 workload, the
(species,m)=(2,2) mesh matches the serial RHS to 5.6e-8 relative and
reaches a scoped 3.11x warm-RHS speedup. It applies streaming, mirror,
curvature, grad-\(B\), and diamagnetic terms. The same artifact advances
100 Euler steps with exact state/field histories but only 0.97x end-to-end
throughput, so no integration-speedup claim is made. This is not evidence for
general strong scaling, GPUs, linked boundaries, or collisions. The
machine-readable evidence is
docs/_static/linear_rhs_species_hermite_profile_cpu.json and is regenerated
with:
python tools/profiling/profile_linear_rhs_parallel_slices.py \
--axis species_hermite --platform cpu --logical-devices 4 \
--nl 4 --nm 16 --ny 64 --nz 64 --warmups 2 --repeats 7 \
--integration-steps 100 --integration-repeats 5 \
--integration-dt 1e-7 --integration-sample-stride 1 \
--out-prefix /tmp/linear_rhs_species_hermite_profile_cpu
Fixed-step nonlinear state sharding
The fixed-step nonlinear runner now has the same full-state sharding contract
as the linear path for release-gated state axes. Set
TimeConfig.state_sharding = "auto" (or a concrete axis such as "ky" or
"kx") with use_diffrax = false to route through
spectraxgk.integrate_nonlinear_sharded. The implementation uses a pjit
scan and preserves the serial Runge-Kutta update; it is therefore an
identity-gated state-sharding primitive, not a halo-exchange FFT domain
decomposition claim. Sharding the z FFT axis is deliberately not exposed as
a release-gated nonlinear runtime path because the current JAX/XLA FFT layout
does not pass the multi-device identity gate.
The profiler/identity artifact is generated with:
python tools/profiling/profile_nonlinear_sharding.py \
--sharding auto --sharding-options auto,kx \
--out-json docs/_static/nonlinear_sharding_profile.json
The JSON records device count, requested sharding axis, warm serial/sharded
timings, profiler-trace status, final-state errors, final-field/RHS diagnostic
errors, and the fastest identity-preserving candidate among the requested
state-axis options. Refreshed profiler outputs also carry a versioned source
contract with the exact command, command argv, source artifact, backend, device
count, sharding axis, warmup/repeat policy, and Python/JAX/NumPy/SPECTRAX-GK
versions. The fast parallel artifact checker validates that contract whenever
it is present; older checked-in diagnostic profiles remain scoped until they
are refreshed with the same metadata. The
local checked-in artifact is deliberately small and only establishes the
control-flow and single-device identity gate. Its constant ky=0, kx=0
state has a zero nonlinear bracket and is superseded for physical identity
decisions. The older two-GPU office artifact
at docs/_static/nonlinear_sharding_profile_office_gpu.json is likewise a
tiny (4,6,8,4,16) smoke test: it records zero state error but no speedup.
It must not be generalized to a transport grid. The matched benchmark-grid
artifact,
docs/_static/nonlinear_sharding_profile_office_gpu_benchmark_grid.json,
uses (4,8,64,192,24) and 20 fixed RK2 steps. Active kx sharding is
slower than serial (0.211x) and fails trajectory identity
(max_abs_state_error=20.0). The final RHS also differs by
max_abs_rhs_error=1279.39; a zero potential difference alone is not a
sufficient diagnostic identity gate. Therefore whole-state nonlinear sharding is blocked from
production routing and runtime claims. The next implementation must change the
decomposition, not relax this gate.
The clean-revision physical refresh is
docs/_static/nonlinear_sharding_profile_office_gpu_physical.json. It uses
three interacting spectral perturbations on a (4,8,32,32,64) state for 100
RK2 steps and records a nonzero initial nonlinear RHS. On two RTX A4000 GPUs,
serial execution takes 3.77 s, while ky and kx whole-state placement
take 9.19 s and 7.22 s; both fail final-state and RHS identity. This artifact
controls the current conclusion and prevents zero-bracket smoke tests from
being promoted as nonlinear decomposition evidence.
For final-state-only optimization or profiling, the explicit scan accepts
return_fields=False. This avoids one post-step RHS evaluation that exists
only to materialize final field history. On the same office GPU and
(4,8,64,192,24) workload, a controlled same-process A/B measurement reduced
the median warm 20-step time by about 5–6%. This is a narrowly scoped
engineering result, not a refreshed end-to-end application speed claim.
The fixed-step profiler also exposed a compilation-cache defect: both serial
and sharded integration wrappers created new static Python closures on every
call, so nominal warm repeats could compile again. The integration API now
passes cache and parameter pytrees dynamically, keeps only mathematical
switches static, memoizes the small grid projector, and reuses a compiled
sharded runner. On the local (2,4,8,8,8) two-step smoke workload, three
post-warmup serial calls take 0.78--0.90 ms and the diagnostic sharded
wrapper takes 0.99--1.07 ms with exact state identity; before the fix the
same sharded wrapper took about 0.41 s per repeat. The refreshed office
artifact at clean commit 91c0c2a7 records a serial median of 0.893 s
and a diagnostic two-GPU median of 4.22 s for 20 RK2 steps. The prior
serial artifact reported 15.37 s because nominal warm repeats recompiled.
This is a substantial single-GPU execution fix, but it is not a multi-device
speedup: the decomposition remains both slower and numerically invalid.
The end-to-end runtime profiler now blocks every returned JAX leaf before
stopping its timer and validates that its default input exists. It also accepts
--repeats and reports each completed warm timing. On the shipped Cyclone
64x64x24 CPU input, a bounded 20-step run at
sample_stride=diagnostics_stride=10 takes 6.05 s warm after a
12.84 s cold pass. This is a profiler baseline, not a publication runtime
row. The matched office A4000 run takes 9.78 s warm with resolved spectra
and 8.69 s with compact scalar diagnostics. The compact route therefore
saves about 11% on this moderate GPU workload, while the matched local CPU
improvement is about 3%. A final-state-only fixed-step GPU integration takes
0.263 s on the same grid, showing that setup, synchronization, and
diagnostic materialization dominate this short end-to-end workload. These are
profiling results, not universal GPU speedup claims. Artifact-producing runs
can request the compact route explicitly with
[output] resolved_diagnostics = false when mode-resolved spectra are not
needed.
Repeated Python simulations should prepare the explicit nonlinear diagnostic scan once instead of rebuilding its closure for every objective or ensemble evaluation:
from spectraxgk.nonlinear import prepare_nonlinear_explicit_diagnostics
simulation = prepare_nonlinear_explicit_diagnostics(
initial_state, grid, geometry, parameters,
dt=0.02, steps=400, resolved_diagnostics=False,
)
final_state, diagnostics, time_step, fields = simulation.run()
simulation.run(new_initial_state) reuses the compiled scan for states with
the same shape and dtype. Method, grid layout, and diagnostic schema are fixed
by this prepared contract. Fixed-step parameter studies may pass a matched
rebuilt cache and parameter PyTree with
simulation.run(cache=new_cache, params=new_params); supplying only one is
rejected because gyroaverages, drifts, and collision arrays would be
inconsistent.
For sensitivity calculations, simulation.run_arrays(new_initial_state)
returns only JAX pytrees and skips host-side diagnostic finalization. Reverse
mode therefore differentiates through the explicit time loop with respect to
the initial state. On fixed-step runs it also differentiates through matched
dynamic (geometry, cache, params) inputs; the cache must be rebuilt from the
same traced geometry and parameters before the call. A physical nonzonal-mode
gate scales curvature and grad-B profiles, propagates the changed geometry
through cache construction and three RK2 steps, and matches a centered finite
difference derivative. Grid shape, geometry sampling layout, method, and
output schema remain static. The current field-solve custom VJP supports this
reverse-mode path but not a forward-mode JVP through the full scan. Adaptive
prepared execution remains available for ordinary state runs, while traced
geometry/cache/parameter overrides fail closed until adaptive-controller
derivative policy gates are implemented.
On the shipped 64x64x24 Cyclone setup, a three-call CPU compile-log gate
records exactly one jit(run_raw) compilation. The first two-step call takes
3.25 s including compilation; repeated calls take 0.297 s and
0.290 s. Rebuilding the runtime closure took 2.27--2.29 s for the same
nominal warm calls. This is a repeated Python-call improvement for fixed
geometry/model policy, not an end-to-end executable or long-run throughput
claim.
The current controlled prepared profiles are tracked as
prepared_nonlinear_runtime_cpu_profile.json and
prepared_nonlinear_runtime_gpu_profile.json. Both use commit d3f3aef8,
Python 3.10.12, JAX 0.6.2, NumPy 2.2.4, adaptive RK3, 200 steps, diagnostic
stride 10, and compact scalar diagnostics on the same office node. The CPU
warm run takes 109.275 s and one RTX A4000 takes 9.338 s, a measured
11.70x device-throughput ratio after separate compilation. This is not an
end-to-end executable or multi-GPU scaling claim. The final-state norm is
identical at recorded precision; timestep, potential, and heat-flux norms
agree within 3.8e-6 relative. The profiler and artifact gate now require
these numerical fingerprints, matched software/configuration, and at least a
5x ratio before the row can remain promoted.
Matched resolved-diagnostic profiles use the same 200-step trajectory and
produce exactly the same recorded final-state, potential, heat-flux, and
timestep norms. On CPU, retaining mode-resolved histories adds 0.62% warm
time and 1.18% peak host RSS. On the A4000, three-repeat medians show
2.36% warm-time overhead, 2.78% peak device-memory overhead, 5.38%
additional live device allocation, and 2.61% peak host-RSS overhead. The
artifact gate permits at most 25% runtime and 10% memory overhead. Compact
diagnostics therefore remain the recommended optimization/UQ path, while
resolved diagnostics are inexpensive enough to enable when spectral evidence
is scientifically required.
Current JAX/XLA CPU backends can abort inside FFT layout/collective code when
the nonlinear whole-state pjit path shards the packed state over multiple
forced CPU devices. The profiling tool therefore skips active multi-device CPU
whole-state sharding by default and records
cpu_whole_state_pjit_sharding_unsafe_for_fft_layout as a fail-closed
blocker. Use --allow-unsafe-cpu-state-sharding only for bounded debugging,
not for a production or manuscript speedup artifact.
The larger strong-scaling sweep is regenerated with isolated subprocesses so each device count gets a clean JAX runtime:
python tools/profiling/profile_nonlinear_sharding.py sweep \
--backend cpu --devices 1,2,4,8 \
--nx 24 --ny 48 --nz 96 --nl 4 --nm 8 --steps 8 \
--out-prefix docs/_static/nonlinear_sharding_strong_scaling_cpu_large
python tools/profiling/profile_nonlinear_sharding.py sweep \
--backend gpu --devices 1,2 \
--nx 48 --ny 96 --nz 128 --nl 4 --nm 8 --steps 12 \
--out-prefix docs/_static/nonlinear_sharding_strong_scaling_gpu_xlarge
# Equivalent office two-GPU profile preset with JAX traces enabled.
python tools/profiling/profile_nonlinear_sharding.py sweep --office-gpu-xlarge
python tools/artifacts/plot_scaling_panels.py nonlinear-sharding
python tools/artifacts/generate_nonlinear_sharding_production_gate.py
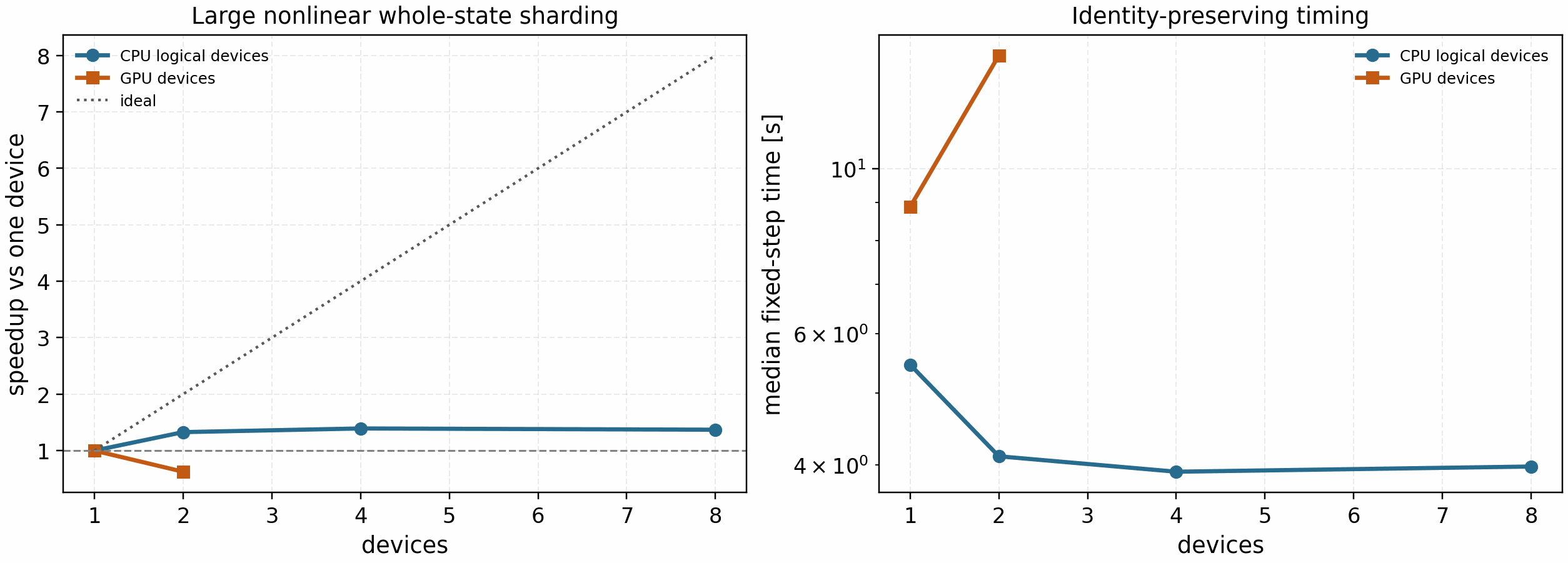
The refreshed large sweep remains engineering evidence rather than a speedup
claim: it passed the final-state identity gate at every tracked point, the CPU
logical-device path saturated at about 1.39x, and the June 21, 2026
two-RTX-A4000 auto route was slower than one GPU for the larger
Nx=48, Ny=96, Nz=128, Nl=4, Nm=8 fixed-step case, with a measured strong
scaling speedup of 0.586x. Current JAX/XLA CPU refreshes are stricter:
unsafe active multi-device CPU whole-state pjit routes are skipped before
execution and record a fail-closed blocker instead of producing a speedup row.
This makes the technical conclusion explicit: whole-state nonlinear sharding is
useful as a correctness/profiler gate, but production parallelization should
prioritize independent k_y scans and UQ/ensemble batching.
Communication-aware nonlinear domain decomposition remains diagnostic until the
exact workload has identity, communication, transport-window, and matched
profiler evidence for any nonlinear multi-GPU speedup claim.
The production gate fails closed as diagnostic_only unless the refreshed
CPU and GPU rows both pass serial identity, use active state sharding, and meet
the configured speedup and parallel-efficiency thresholds. The tracked gate
artifact is docs/_static/nonlinear_sharding_production_speedup_gate.json.
In the current artifact set the CPU candidate is diagnostic and the refreshed
GPU row is identity-complete but blocks production speedup claims because the
speedup and efficiency gates fail. Its backend_blocker_report separates
identity-evidence completeness from speedup/efficiency blockers, so an
identity-correct slowdown is recorded as a useful negative result rather than
as a promoted parallelization mode.
The raw sweep JSON files also carry speedup_passed, status, and
speedup_blockers fields so a timeout, profiler failure, or identity-correct
slowdown is visible before the stricter production gate is evaluated.
This claim boundary is mirrored in Parallelization policy and Release Scope and Claim Boundaries. If a future optimization changes the conclusion, refresh the CPU and GPU sweep artifacts before changing README or release-note wording.
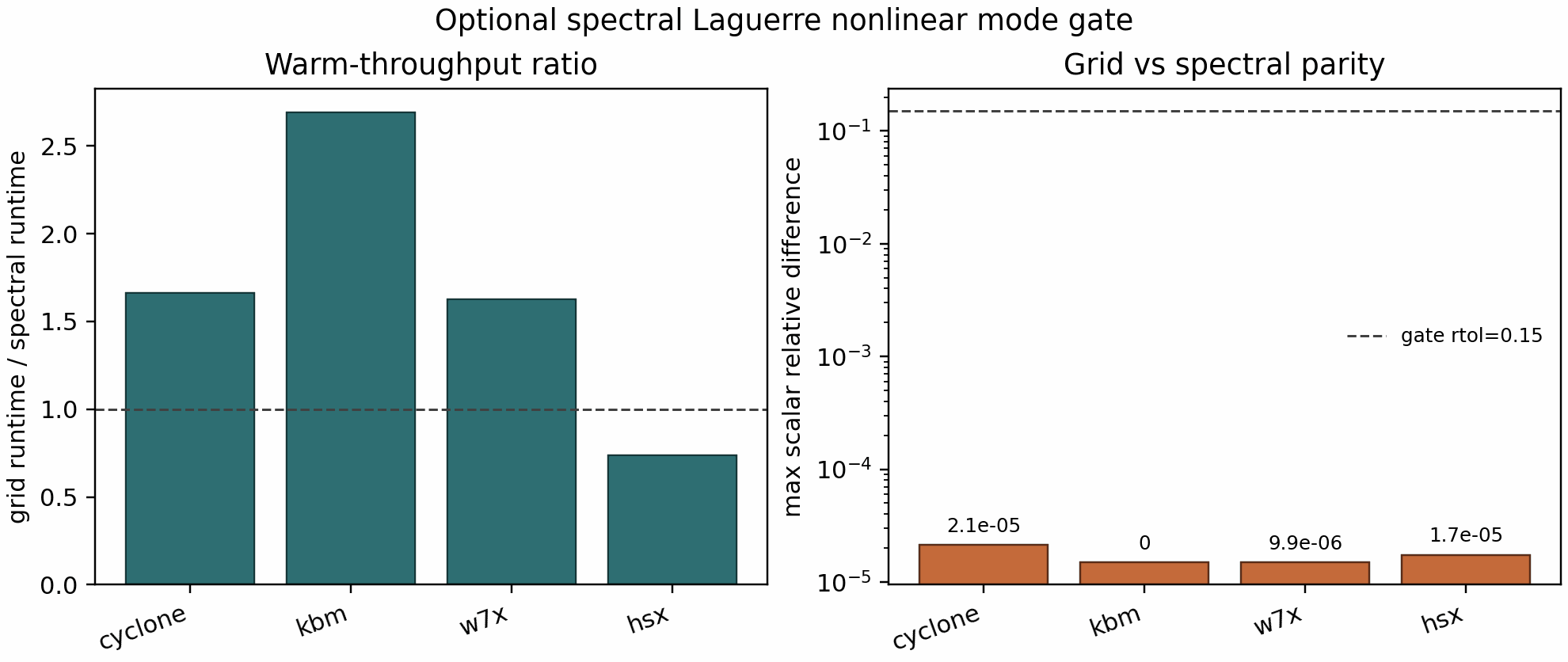
Spectral nonlinear mode (gated fast toggle)
The spectral nonlinear mode skips Laguerre quadrature for the nonlinear bracket
(laguerre_nonlinear_mode = "spectral" or "fast"). It is not the default
mode because the speedup is case and backend dependent. The release gate runs
the same bounded nonlinear case twice, once with default grid-mode brackets and
once with spectral brackets, then compares end-of-run scalar diagnostics.
python tools/artifacts/gate_laguerre_nonlinear_modes.py \
--case cyclone --case kbm --case w7x --case hsx \
--out-json docs/_static/laguerre_mode_gate.json \
--out-csv docs/_static/laguerre_mode_gate.csv \
--plot-out docs/_static/laguerre_mode_gate.png
For a GPU reference artifact, run the same command on the target GPU node with GPU-specific output paths, for example:
python tools/artifacts/gate_laguerre_nonlinear_modes.py \
--case cyclone --case kbm --case w7x --case hsx \
--out-json docs/_static/laguerre_mode_gate_gpu.json \
--out-csv docs/_static/laguerre_mode_gate_gpu.csv \
--plot-out docs/_static/laguerre_mode_gate_gpu.png
For W7-X/HSX runs, pass --w7x-geometry-file and
--hsx-geometry-file if the local pre-generated *.eik.nc files live
outside the default cache paths.
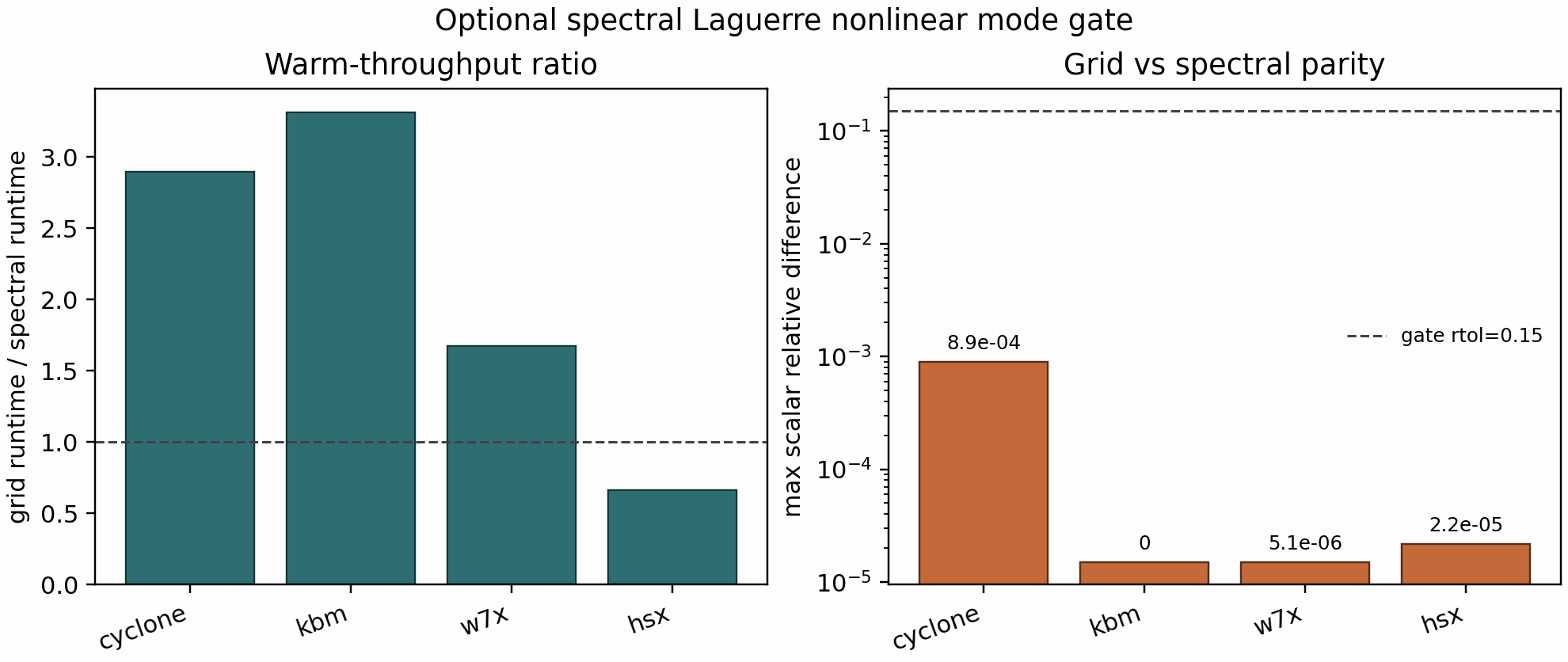
On the bounded local CPU gate, Cyclone, KBM, W7-X, and HSX all passed the
scalar-diagnostic parity threshold with maximum relative differences below
8.9e-4. The measured grid/spectral runtime ratios were:
Cyclone:
2.90KBM:
3.31W7-X:
1.67HSX:
0.66
On the bounded office GPU gate, all four cases also passed with maximum
relative differences below 2.2e-5. The measured grid/spectral runtime
ratios were:
Cyclone:
1.66KBM:
2.69W7-X:
1.63HSX:
0.74
Because HSX is slower in both bounded gates, the spectral mode should be treated as a validated optional engineering mode, not a global fast default.
A July 10, 2026 follow-up extended the Cyclone A4000 comparison from two steps
to 400 steps (t=20) with a stricter five-percent gate. The spectral route
passed with 8.71e-4 maximum relative scalar difference, 1.78e-4
heat-flux endpoint difference, and a 1.73x end-to-end runtime ratio. A
matched kernel split measured grid-mode nonlinear_bracket=1.91e-2 s and
full_rhs=2.74e-2 s versus spectral-mode 4.59e-3 s and 1.35e-2 s.
This strengthens the bounded Cyclone fast-toggle evidence but does not replace
the required long saturated-window gates for W7-X, HSX, and KBM.
The same refresh measured prepared 20-step wall times of 4.55 s on the
local CPU (JAX 0.9.2) and 1.46 s on one office A4000 (JAX 0.4.38). Because
those software stacks are not matched, these values are diagnostic and do not
replace the README runtime panel or support a new CPU/GPU speedup claim.
Production use should rerun the gate on the target case and backend before
claiming speedup.
Runtime and memory comparison workflow
For the publication runtime comparison pass, use the manifest-driven runner:
python benchmarks/performance/benchmark_runtime_memory.py --list
python benchmarks/performance/benchmark_runtime_memory.py --dry-run --case cyclone-linear --backend spectrax_cpu
python benchmarks/performance/benchmark_runtime_memory.py --continue-on-error --log-dir tools_out/runtime_memory_logs
The runner reads tools/runtime_memory_manifest.toml and writes:
tools_out/runtime_memory_results.csvtools_out/runtime_memory_summary.jsontools_out/runtime_memory_logs/*.stdout.logtools_out/runtime_memory_logs/*.stderr.logdocs/_static/runtime_memory_benchmark.png
The promoted runtime/memory result files are also indexed from the root-level
benchmarks/results/manifest.toml so users can find benchmark outputs without
searching through scratch directories. Raw logs and NetCDF files should stay in
tools_out/ or another scratch location; only the reviewed summary CSV/JSON
and compressed panel are tracked.
The manifest is designed to hold three rows per case:
spectrax_cpuspectrax_gpugx
Each row may also carry a host so the same runner can execute local and
remote measurements through one manifest while still collecting wall time and
peak RSS from the target machine.
Rows may also carry a profile_command. When that secondary command succeeds
and prints warmup_time_s=... / run_time_s=..., the runner merges those
warm measurements back into the same CSV/JSON summary row as the cold pass.
If a profiling command prints warmup_time_s=... or run_time_s=..., the
runner also records those fields in the CSV/JSON summary so cold and warm JAX
timings can be tracked without a separate sidecar note.
The checked-in case inventory for the current release panel covers the shipped runtime families:
Cyclone ITG linear and nonlinear
ETG linear
KBM linear and nonlinear
W7-X linear and nonlinear
HSX linear and nonlinear
Cyclone Miller nonlinear
These rows are the ones shown in the README/runtime panel. ETG nonlinear, KAW, and TEM remain separate tracked work items and are intentionally excluded from the shipped runtime figure until their release-grade benchmark contracts are closed.
For the stellarator rows on the office benchmark host, the shipped panel uses pre-generated *.eik.nc geometry files instead of live VMEC regeneration. The GX reference rows on that host also need a consistent local netcdf-c / hdf5 runtime stack; the default office stellarator runtime environment mixed incompatible HDF5 / NetCDF libraries and lacked the Python geometry helper dependencies needed for VMEC-driven geometry generation.
Final runtime/memory figure
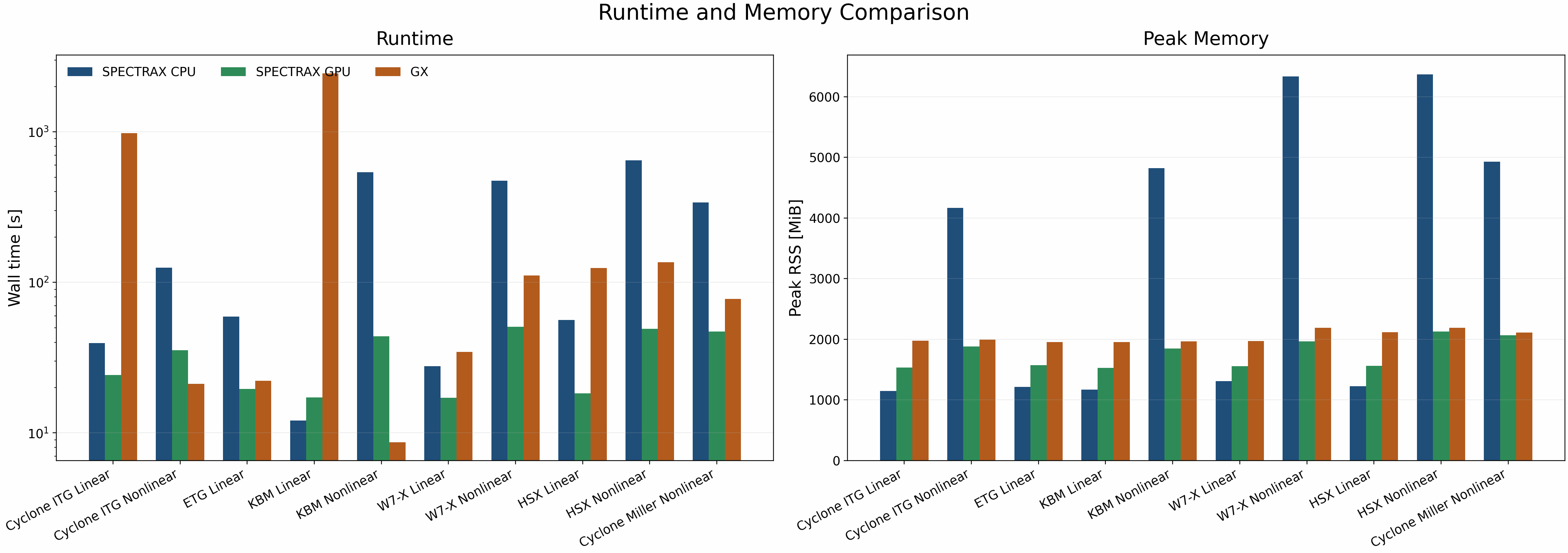
The runtime subplot uses a log scale because the measured wall times span roughly three orders of magnitude across the linear, nonlinear, and imported geometry cases. The memory subplot stays linear because the peak RSS spread is much narrower.
The assembled figure is generated from the collected per-case summaries with
benchmarks/performance/benchmark_runtime_memory.py --summary-glob ... and written to:
docs/_static/runtime_memory_benchmark.pngdocs/_static/runtime_memory_benchmark.pdf
For the shipped refresh shown here, use the successful release summary rather than the older interrupted summary that contains failed W7-X/HSX nonlinear rows:
python benchmarks/performance/benchmark_runtime_memory.py \
--summary-glob docs/_static/runtime_memory_summary_ship_refresh.json \
--csv-out docs/_static/runtime_memory_results_ship_refresh.csv \
--summary-out docs/_static/runtime_memory_summary_ship_refresh.json \
--plot-out docs/_static/runtime_memory_benchmark.png
The published runtime figure complements the atlas instead of duplicating it: the atlas carries growth/frequency and nonlinear transport/energy comparisons, while the runtime figure carries CPU/GPU/reference wall time and peak RSS for the shipped runtime cases.
Interpretation of short nonlinear GPU rows
The shipped runtime panel reports cold wall time. For the JAX backends, this includes startup and compilation, so short nonlinear cases can look worse than their steady-state throughput would suggest.
Targeted office GPU profiles on the same shipped short nonlinear configs
measured:
Cyclone nonlinear: warmup_time_s=33.957 run_time_s=15.054
KBM nonlinear: warmup_time_s=27.485 run_time_s= 9.725
Compared with the cold runtime panel rows:
Cyclone nonlinear GPU:
38.27 sin the shipped panel, versus15.05 sfor the second run on the same compiled executable.KBM nonlinear GPU:
44.33 sin the shipped panel, versus9.73 sfor the second run on the same compiled executable.
This changes the optimization reading:
the current short-run Cyclone GPU deficit in the shipped panel is primarily a cold-start effect, since the warm run is already faster than the tracked GX row,
the current short-run KBM GPU gap is mostly compile amortization, with warm performance already close to GX.
The runtime figure now overlays those warm second-run measurements as hollow
diamond markers on the runtime bars wherever run_time_s is present in the
summary input.
The highest-value performance work for these short nonlinear lanes is therefore compile/startup reduction and executable reuse, not just per-step kernel work.
Startup phase profiler
For cold-start deep dives, use the dedicated startup profiler:
python tools/profiling/profile_startup_and_cache.py runtime-startup \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear.toml \
--ky 0.3 --Nl 4 --Nm 8 --compile-steps 1 \
--json-out tools_out/startup_cyclone_gpu.json \
--csv-out tools_out/startup_cyclone_gpu.csv
The profiler breaks the cold path into the main setup and first-compile phases:
runtime config load
geometry resolution
grid/default construction
parameter and term setup
initial-condition construction
linear-cache construction
first field solve compile+execute
first linear/full RHS compile+execute
first nonlinear integrator compile+execute
It supports --trace-dir and --memory-profile for XProf/Perfetto
inspection with phase-level annotations, and --debug-log-cache /
--explain-cache-misses for JAX cache diagnostics when a repeated compile
path looks suspicious.
By default the trace tools now start JAX profiling with
python_tracer_level=0 and host_tracer_level=0. On the lightweight
office environment this avoids the optional TensorFlow Python-hook import
path, so traces are emitted cleanly without installing TensorFlow just to
silence profiler startup noise.
The current office GPU startup profiles for the shipped short nonlinear
cases show the same dominant structure:
Cyclone nonlinear startup total:
35-36 safter the low-rank collision-cache and host-cache cleanup passes (previously41.47 son the earlier office snapshot)KBM nonlinear startup total:
32.23 sdominant phases in both cases:
compile_first_integrator_run: about22 s(Cyclone),19.28 s(KBM)build_linear_cache: about5.6 s(Cyclone),7.73 s(KBM)compile_first_linear_rhs/compile_first_full_rhs: another3.0 + 3.0 s(Cyclone) or1.7 + 1.7 s(KBM)
So the next high-value performance work is no longer the analytic geometry startup path or the collision prefactor path; it is the first compiled nonlinear integrator path, followed by the remaining Laguerre and drift/cache construction subphases.
To break the cache-construction lump down further, use:
python tools/profiling/profile_startup_and_cache.py linear-cache \
--config examples/nonlinear/axisymmetric/runtime_cyclone_nonlinear.toml \
--Nl 4 --Nm 8 \
--json-out tools_out/linear_cache_cyclone_gpu.json \
--csv-out tools_out/linear_cache_cyclone_gpu.csv
The current office GPU decomposition for the shipped Cyclone short
nonlinear lane is:
total measured decomposition:
6.86 safter the low-rank collision-cache, host-cache, and broadcasted-gyroaverage passesdominant subphases:
gyro_bessel_cache:1.33 slaguerre_cache:1.21 skperp_and_drifts:0.99 sgeometry_coefficients:0.68 scollision_and_damping_cache:0.17 s
The low-rank collision cache, host-built moment/damping factors, and broadcasted gyroaverage construction remove the old collision/damping bottleneck from the cache profile. The overall cold-start wall clock is still dominated by the first nonlinear integrator compile. The next cache-build optimization work should therefore focus on Laguerre and drift/cache construction, while the broader startup campaign should prioritize the first integrator compile surface.
Cached basis indices
To reduce per-step overhead, the linear cache now stores Laguerre/Hermite index
arrays (\(l\), \(m\)) and derived coefficients (l+1, m+1,
sqrt(m), sqrt(m+1)). These are reused inside the mirror/curvature
terms and the implicit preconditioner instead of re-allocating on every RHS
call. The change is small in absolute cost for low-order runs, but becomes
noticeable in higher-order scans and tight profiling loops.
GMRES preconditioner policy
The implicit linear solver exposes several preconditioner policies, with shape, finite-value, linked-boundary, and shift-invert contracts covered by the solver test suite rather than by an untracked ad-hoc profiling harness:
diag: full diagonal (damping + drift + mirror)pas: PAS line preconditioner (streaming + diagonal damping/drifts)pas-coarse: line + kx-coarse additive correction (Schur-style)hermite-line: Hermite streaming line solve (tridiagonal inmat fixed \(k_z\))hermite-line-coarse: Hermite line solve + kx-coarse correction
Use tests/unit/linear/test_linear.py and
tests/unit/linear/test_linear_helpers_extra.py as the maintained
verification owners for these policies. Fresh runtime or iteration-count claims
should be added through the tracked performance manifest and profiling tools,
not through standalone probe scripts.
JIT considerations
The linear integrator is jit-compiled with the number of steps and method
as static arguments. The operator term switches (spectraxgk.linear.LinearTerms)
should also remain static inside a compiled loop to avoid recompilation. The
cached operator arrays can be constructed once and reused across multiple runs
to avoid repeated geometry setup costs. Nonlinear IMEX paths now reuse the
electrostatic compiled linear-RHS route whenever apar=bpar=0; this is a
bounded fast path for adiabatic-electron electrostatic runs, not a new runtime
claim until a fresh end-to-end profile is recorded.
Planned optimizations
vmapover species and parameter scansJAX mesh-based parallelization across multiple devices
FFT acceleration and layout tuning
operator fusion for nonlinear terms
Linear-to-nonlinear optimization roadmap
The current benchmark runtime gap on CPU is dominated by JAX compile latency and repeated small-shape scan launches. The next implementation phase targets both linear and nonlinear performance with a single operator strategy:
Compile-once scan kernels
enforce fixed batch shapes across
kyandbetascans,pre-JIT a small set of canonical
(Nl, Nm, Ny, Nz)signatures,cache compiled executables on disk for repeated benchmark sweeps.
Operator fusion in RHS assembly
merge streaming/mirror/curvature/grad-B stencils into one fused kernel,
remove scatter-heavy intermediate writes,
keep field coupling and species sums contiguous in memory.
Matrix-free eigen path as default for linear scans
use Krylov/shift-invert for scan tables and figures,
reserve long time integration for spot-check diagnostics only.
Preconditioner reuse
persist Hermite-line and shift-invert preconditioner structures across neighboring scan points (same geometry/grid),
reuse Jacobian-like linearization objects in IMEX stages.
Streaming diagnostics by default
avoid storing full time traces unless explicitly requested,
compute growth/frequency online from selected mode signals.
These steps are chosen to carry directly into nonlinear runs, where the same fused RHS, scan batching, and preconditioner reuse will dominate throughput and memory behavior.